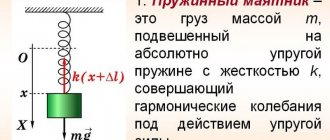
Понятие энергии
Прежде чем рассматривать особенности пружины следует уделить внимание тому, что с ней происходит при сжатии, растяжении и каким образом она оказывает воздействие на тело, окружающую систему. Энергия – скалярная физическая величина, которая применяется для определения формы движения и взаимодействия материи
Важным моментом назовем то, что если система замкнутая, то усилие сохраняется на протяжении длительного периода. Сегодня она окружает нас практически везде и касается довольно большого количества объектов.
Довольно большое распространение получило понятие кинетическая энергия пружины. Она связано с непосредственными особенностями самого изделия. При воздействии определенного усилия на витки, расположенные вдоль одной спирали, формируется сила, которая может использоваться в качестве полезной работы.
Виды пружинного маятника
Выделяют несколько различных видов пружинного маятника. Стоит учитывать, что классификация может проводится по типу устанавливаемой пружины. Среди особенностей отметим:
- Довольно большое распространение получили вертикальные колебания, так как в этом случае на груз не оказывается сила трения и другое воздействие. При вертикальном расположении груза существенно увеличивается степень воздействия силы тяжести. Распространен этот вариант исполнения при проведении самых различных расчетов. За счет силы тяжести есть вероятность того, что тело в исходной точке будет совершать большое количество инерционных движений. Этому также способствует упругость и инерция движения тела в конце хода.
- Также применяется горизонтальный пружинный маятник. В этом случае груз находится на опорной поверхности и на момент перемещения также возникает трение. При горизонтальном расположении сила тяжести работает несколько иначе. Горизонтальное расположение тела получило широкое распространение в различных задачах.
Рассчитывается движение пружинного маятника можно при использовании достаточно большого количества различных формул, который должны учитывать воздействие всех сил. В большинстве случаев устанавливается классическая пружина. Среди особенностей отметим следующее:
- Классическая витая пружина сжатия сегодня получила весьма широкое распространение. В этом случае между витками есть пространство, которое называется шагом. Пружина сжатия может и растягиваться, но зачастую она для этого не устанавливается. Отличительной особенностью можно назвать то, что последние витки выполнены в виде плоскости, за счет чего обеспечивается равномерное распределения усилия.
- Может устанавливаться вариант исполнения для растяжения. Он рассчитан на установку в случае, когда приложенное усилие становится причиной увеличения длины. Для крепления проводится размещение крючков.
Распространены оба варианта исполнения
При этом важно уделить внимание тому, чтобы сила прикладывалась параллельно оси. В противном случае есть вероятность смещения витков, что становится причиной возникновения серьезных проблем, к примеру, деформации
Понятие энергии
Для работы двигателей, которые придают движение автомобилям, тракторам, тепловозам, самолетам, нужно топливо, которое является источником энергии. Электродвигатели придают движение станкам при помощи электроэнергии. За счет энергии воды, падающей с высоты, оборачиваются гидротурбины, соединенные с электрическими машинами, производящими электрический ток. Человеку для того, чтобы существовать и работать, также нужна энергия. Говорят, что для того, дабы выполнять какую-нибудь работу, необходима энергия. Что же такое энергия?
- Наблюдение 1. Поднимем над землей мяч. Пока он пребывает в состоянии спокойствия, механическая работа не выполняется. Отпустим его. Под действием силы тяжести мяч падает на землю с определенной высоты. Во время падения мяча выполняется механическая работа.
- Наблюдение 2. Сомкнем пружину, зафиксируем ее нитью и поставим на пружину гирьку. Подожжем нить, пружина распрямится и поднимет гирьку на некую высоту. Пружина выполнила механическую работу.
- Наблюдение 3. На тележку закрепим стержень с блоком в конце. Через блок перекинем нить, один конец которой намотан на ось тележки, а на другом висит грузик. Отпустим грузик. Под действием силы тяжести он будет опускаться книзу и придаст тележке движение. Грузик выполнил механическую работу.
После анализа всех вышеперечисленных наблюдений можно сделать вывод, что если тело или несколько тел во время взаимодействия выполняют механическую работу, то говорят, что они имеют механическую энергию, либо энергию.
Работа.
Пусть на тело действует постоянная сила и тело, двигаясь прямолинейно по горизонтальной поерхности, совершило перемещение . Сила не обязательно является непосредственной причиной перемещения (так, сила тяжести не является непосредственной причиной перемещения шкафа, который передвигают по комнате). Предположим сначала, что векторы силы и перемещения сонаправлены (рис. 1; остальные силы, действующие на тело, не указаны)
| Рис. 1.A=Fs |
В этом простейшем случае работа определяется как произведение модуля силы на модуль перемещения:
. (1)
Единицей измерения работы служит джоуль (Дж): Дж=Н м. Таким образом, если под действием силы 1 Н тело перемещается на 1 м, то сила совершает работу 1 Дж.
Работа силы, перпендикулярной перемещению, по определению считается равной нулю. Так, в данном случае сила тяжести и сила реакции опоры не совершают работы.
Пусть теперь вектор силы образует с вектором перемещения острый угол (рис. 2).
|
| Рис. 2. A=Fs cos |
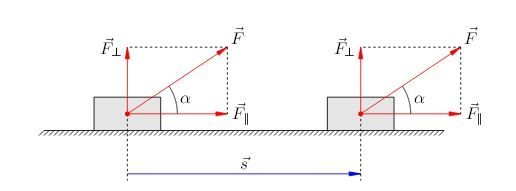
Разложим силу на две составляющие: (параллельную перемещению) и (перпендикулярную перемещению). Работу совершает только . Поэтому для работы силы получаем:
. Итак,
. (2)
Если вектор силы образует с вектором перемещения тупой угол , то работа по-прежнему определяется формулой (2). В этом случае работа оказывается отрицательной.
Например, работа силы трения скольжения, действующей на тело в рассмотренных ситуациях, будет отрицательной, так как сила трения направлена противоположно перемещению. В этом случае имеем:
, и для работы силы трения получаем:
,
где — масса тела, — коэффициент трения между телом и опорой.
Соотношение (2) означает, что работа является скалярным произведением векторов силы и перемещения:
Это позволяет вычислять работу через координаты данных векторов:
Пусть на тело действуют несколько сил и — равнодействующая этих сил. Для работы силы имеем:
,
или
,
где — работы сил . Итак, работа равнодействующей приложенных к телу сил равна сумме работ каждой силы в отдельности.
Задачи по теме с подробными решениями
Задача 1
Самолет, масса которого составляет 50 тонн, пролетает на высоте 10 километров. Скорость транспортного средства равна 900 км/ч. Требуется рассчитать, какова полная механическая энергия самолета.
Решение
Первым шагом является перевод искомых данных, согласно системе СИ. В таком случае масса самолета составит 50 000 кг, скорость – 250 м/с, а высота – 10 000 м.
Самолет обладает запасом полной энергии, которая включает и потенциальную, и кинетическую.
E = Eп + Ек
Eп = m * g * h
Ек = m * v2 / 2
Таким образом, полная энергия составит:
\(E=m\times g\times h\times \frac{mv^{2}}{2}\)
Если подставить в полученную формулу числовые значения величин из условия задачи, то получим полную энергию:
\(E=6.5625\times 10^{9}\) Дж
Если записать ответ сокращенно, то он примет такой вид:
\(Е = 6,5625\) Гдж.
Ответ: в рассмотренной системе отсчета значение полной механической энергии самолета составит 6.5625 Гдж.
Однако, данную задачу можно решить, принимая за нулевой уровень отметку в 10 километров. Тогда транспортное средство будет характеризоваться лишь запасом кинетической энергии, а значение потенциальной энергии будет равно нулю.
Задача 2
Пружину закрепили к стене и поместили на гладкую поверхность. На конце пружины зафиксировали тело. Растяжение пружины, которая обладает жесткостью в 400 Н/м, происходит при воздействии силы в 80 Н. Требуется рассчитать запас энергии в пружине.
Решение
Согласно условию задачи, поверхность обладает гладкостью, что позволяет сделать вывод о нулевом значении силы трения. Таким образом, потери энергии исключены. Воздействуя на пружину, можно наблюдать ее деформацию. Весь запас энергии будет сосредоточен в ней. Найти данную величину можно по формуле:
\(E=\frac{k(\Delta x)^{2}}{2}\)
Сила упругости равна произведению жесткости на изменение длины пружины:
\(k\times \Delta x=F\)
Деформацию пружины можно рассчитать таким образом:
\(\Delta x=\frac{F}{k}\)
Используя последнее равенство, можно преобразовать формулу для расчета энергии:
\(E=\frac{k(\frac{F}{k})^{2}}{2}=\frac{kF^{2}}{2k^{2}}=\frac{F^{2}}{2k}\)
Далее следует подставить числовые значения в полученное выражение:
\(E=\frac{80^{2}}{2\times 400}=8\) Дж
Ответ: запас энергии в пружине составляет 8 Дж.
Задача 3
Масса пули составляет 9 грамм. Ее выпустили из оружия вертикально в верхнем направлении. Скорость пули при этом составила 700 м/с. Требуется рассчитать ее кинетическую энергию.
Решение
Условия задачи удобно представить в виде рисунка.
Расчет нужно выполнить по формуле:
\(E=\frac{mv^{2}}{2}\)
Перед тем, как подставить в уравнение числовые значения, требуется перевести их в систему СИ. Тогда масса пули составит 0,009 кг. Выражение будет записано следующим образом:
\(E=\frac{0.009\times 49\times 10^{4}}{2}=2200\) Дж
Ответ: запас кинетической энергии пули равен 2200 Дж.
Задача 4
Масса ракеты составляет 0,2 кг. Ее выпустили из орудия вертикально вверх. После этого ракета достигла высоты в 60 метров. Требуется рассчитать значение потенциальной энергии ракеты, характерной для этой отметки.
Решение
Условие задачи можно представить с помощью рисунка.
Для того чтобы рассчитать потенциальную энергию, требуется воспользоваться формулой:
E = m * g * h
Далее необходимо подставить в выражение числовые значения:
Е = 0,2 * 9,8 * 60 = 118 Дж
Ответ: потенциальная энергия ракеты на заданной высоте составит 118 Дж.
Задача 5
Пружину растянули на 5 мм. Коэффициент ее жесткости составляет 10000 Н/м. Требуется вычислить, какова энергия пружины.
Решение
Следует представить условия задачи на рисунке.
Уравнение, с помощью которого можно рассчитать энергию пружины, имеет такой вид:
\(E=\frac{k(\Delta x)^{2}}{2}\)
Далее необходимо привести к системе СИ расстояние, на которое растянули пружину. Оно составит 0,005 м.
После преобразований можно подставить числовые значения в искомую формулу:
\(E=\frac{10^{4}\times 25\times 10^{-6}}{2}=0.125\) Дж
Ответ: энергия пружины составляет 0,125 Дж.
Знание основных формул для расчета кинетической, потенциальной и полной энергии тела позволит решить задачи любой сложности. Наиболее простым способом является выполнение последовательных действий, включая запись условий задачи, графическое изображение системы, представление формул для вычисления энергии, решение уравнения с помощью подстановки числовых значений
Важно отметить, что механическая энергия представляет собой сумму потенциальной и кинетической энергии
Потенциальная энергия пружины и кинетическая – что это, какая формула?
Во многих механизмах используется потенциальная и кинетическая энергия пружины. Их используют для выполнения различных действий. В отдельных узлах они фиксируют детали в определенном положении, не позволяя смещать в какую-либо сторону (барабан револьвера относительно корпуса). Другие пружинные системы возвращают исполнительный механизм в исходное положение (курок ручного огнестрельного оружия). Есть устройства, где узлы с гибкими свойствами совершают перемещения в устойчивое положение (механические стабилизаторы).
Работа связана с изменением геометрических параметров упругого тела. Прилагая нагрузку, заставляют эластичную деталь сжиматься (растягиваться или изгибаться). При этом наблюдается запасание энергии. Возвратное действие сопровождается набором скорости. Попутно возрастает кинетическая энергия.
Рассматривая в качестве накопителя энергии пружину, следует отметить ее отличительные свойства от иных физических тел, которые могут накапливать энергетический потенциал. Традиционно понимается следующее: для накопления потенциала для последующего движения необходимо совершение движения в силовом поле:
Еп = F ⋅ l, Дж (Н·м),
где Еп- потенциальная энергия положения, Дж;
F — сила, действующая на тело, Н;
l — величина перемещения в силовом поле, м.
Энергия (работа) измеряются в Джоулях. Величина представляет произведение силы (Н) на величину перемещения (м).
Если рассматривать условие в поле тяготения, то величина силы находится произведением ускорения свободного падения на массу. Здесь сила веса находится с учетом g:
Еп = G ⋅ h = m ⋅ g ⋅ h, Дж
здесь G — вес тела, Н;
m — масса тела, кг;
g — ускорение свободного падения. На Земле эта величина составляет g = 9,81 м/с².
Если расстраивается пружина, то силу F нужно определять, как величину, пропорциональную перемещению:
F = K ⋅ x, Н,
где k — модуль упругости, Н/м;
х — перемещение при сжатии, м.
Величина сжатия может изменяться по величине, поэтому математики предложили анализировать подобные явления с помощью бесконечно малых величин (dx) .
При наличии непостоянной силы, зависящей от перемещения, дифференциальное уравнение запишется в виде:
dEп = k ⋅ x ⋅ dx
здесь dEп — элементарная работа, Дж;
dx — элементарное приращение сжатия, Н.
Интегральное уравнение на конечном перемещении запишется в виде. Ниже вывод формулы:
Пределами интегрирования является интервал от 0 до х. Деформированная пружина приобретает запас по энергетическим показателям
Окончательно формула для расчета величины потенциальной энергии сжатия (растягивания или изгиба) пружины запишется формулой:
Изменение кинетической энергии
Приведенная выше информация указывает на то, что рассматриваемое значение не имеет постоянный показатель. Среди особенностей отметим:
- Наибольшее значение характерно максимальному удлинению витков относительно друга друга. При этом не стоит забывать о том, что есть определенное ограничение, касающееся максимального удлинения, так как слишком большая нагрузка становится причиной деформации.
- При приближении тела к точке равновесия оно снижается. Это связано с тем, что показатель упругости существенно снижается.
Кроме этого, параметр зависит от воздействия других сил. Примером можно назвать трение, которая снижает скорость перемещения объекта.
Период и частота свободных колебаний пружинного маятника
При разработке проектов всегда определяется период колебаний и их частота. Для их измерения используются известные в физике формулы.
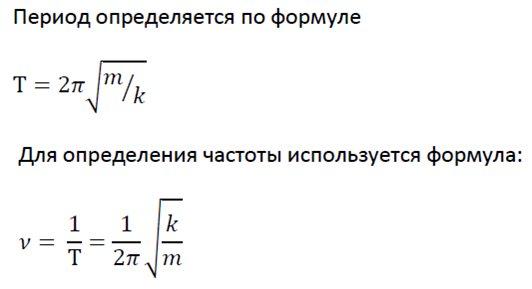
Изменение циклической частоты покажет формула, приведенная на рисунке:
Факторы, от которых зависит частота:
- Коэффициент упругости.
На этот коэффициент влияет количество витков, их диаметр, расстояние между ними, длина пружины, жесткость используемого сплава и т. д.
- Масса груза.
От этого фактора зависит возникающая инерция и скорость перемещения.
Вычисление работы силы упругости
Груз совершил известное перемещение, величину силы упругости мы также знаем, векторы перемещения и силы упругости параллельны. Казалось бы, все ясно – нужно умножить величину силы на величину перемещения и получить значение работы. Однако здесь не все так просто – разберемся почему.
О чем нам говорит формула, которая выражает величину силы упругости? О том, что сила упругости – величина не постоянная, она меняется по мере перемещения груза. И действительно, величина этой силы, как мы видим из формулы, зависит от координаты центра груза. Формула же для работы силы, которую мы применяли раньше, справедлива лишь в том случае, если сила не меняет свою величину по мере движения. Как же тогда быть? Один из вариантов выхода из данной ситуации мог бы состоять в том, что мы применим такой же метод, который применялся нами ранее в разделе кинематика при расчете перемещения тела, движущегося равноускоренно.
Можно всю траекторию движения груза разбить на очень маленькие участки (участки, в пределах которых силу упругости можно считать практически постоянной). Далее в пределах каждого такого участка мы можем рассчитать работу силы упругости ввиду ее практического постоянства. Затем работа на всей области движения груза будет складываться из всех этих маленьких работ на этих участках. Таким образом, мы сможем посчитать работу силы упругости на всей траектории движения груза. На рис. 4 приведены детали такого расчета.
Рис. 4. Зависимость силы упругости от координаты движения
Видно, что если отложить на графике зависимость модуля силы упругости от модуля координаты груза, затем проделать описанное выше разбиение на маленькие участки, то величина работы на каждом маленьком участке численно равна площади фигуры, ограниченной графиком: осью абсцисс и двумя перпендикулярами к этой оси (см. рис. 5).
Рис. 5. Площадь фигуры
Если просуммировать значение работы на каждом участке (площадь маленьких фигур), то получим площадь большой фигуры, показанной на рис. 6.
Рис. 6. Площадь большой фигуры
Поскольку данная фигура является прямоугольной трапецией, то мы можем воспользоваться формулой для расчета площади такой фигуры – это полусумма оснований, умноженная на высоту. В результате преобразований получим такую формулу – работа равна разности между величиной:
К этому результату можно прийти и несколько иным способом. Для вычисления работы силы упругости в этом способе необходимо просто взять среднее значение силы упругости и умножить его на перемещение тела. Это утверждение можно записать как:
,
где среднее значение силы упругости, которое равно полусумме начального и конечного ее значений. Если данное выражение подставить в формулу для работы, то при помощи простых алгебраических преобразований мы получим то же самое выражение, что получали ранее:
Как видно из этой формулы, работа зависит лишь от начальной и конечной координаты центра груза, и еще одно замечание: как видно из последней формулы, работа силы упругости никоим образом не зависит от массы груза. Это обусловлено тем, что и сама сила упругости не зависит от этой массы.
Теперь внимательнее посмотрим на последнюю формулу – если вынести -1 за скобки, то получим, что работа есть взятая со знаком минус разность между значениями некоторой величины, равной половине произведения жесткости пружины на квадрат ее удлинения в конечный и начальный моменты времени.
Вспомним, как мы поступили при расчете работы силы тяжести на прошлом уроке. В тот раз мы столкнулись с новой для нас физической величиной, разность между значениями которой в конечной и начальной моменты времени равнялась взятой со знаком « — » работе силы тяжести. Это величина, равная произведению массы тела на ускорение свободного падения и высоту, на которую было поднято тело над некоторым уровнем, мы назвали потенциальной энергией тела, поднятого над землей.
Подробное объяснение пружинного и математического маятника
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию) где k — жесткость тела, — длина недеформированного тела, l — длина деформированного тела.
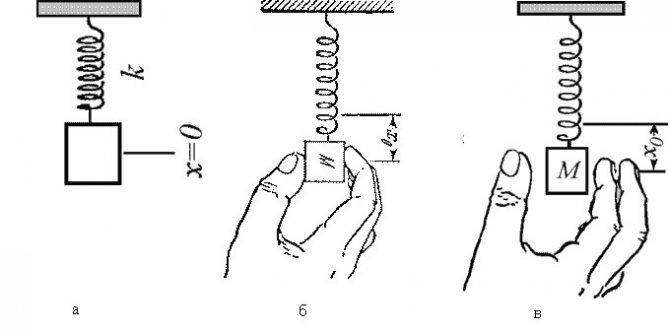
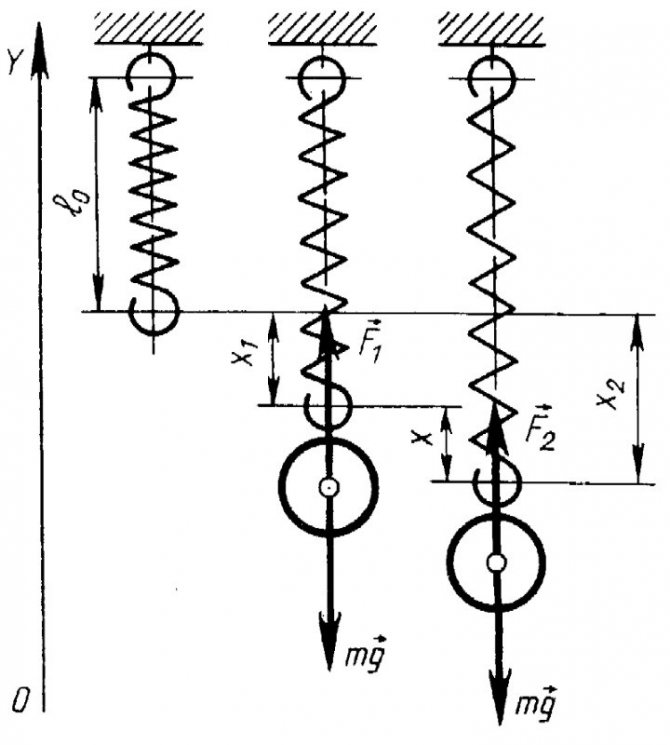
Простейшая колебательная система может быть получена с использованием груза и пружины.
Прикрепим груз массой m, лежащий на гладкой горизонтальной поверхности, к невесомой упругой пружине жесткостью k, второй конец которой зафиксирован (рис. 181). Такая система называется пружинным маятником. Запишем второй закон Ньютона для этой системы
В проекции на ось Ох с учетом закона Гука получаем или
Запишем это уравнение в форме, аналогичной уравнению движения гармонического осциллятора:
Сравнивая полученное выражение с уравнением гармонических колебаний находим циклическую частоту колебаний пружинного маятника
Тогда период колебаний пружинного маятника можно найти по формуле
Свойство независимости периода колебаний маятника от амплитуды, открытое Галилеем, называется изохронностью (от греческих слов — равный и — время).
Как видим, пружинный маятник обладает свойством изохронности, поскольку период его колебаний не зависит от амплитуды.
Одной из наиболее распространенных колебательных систем является математический маятник.
Математическим маятником называется материальная точка массой m, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 182).
Галилео Галилей экспериментально установил, что период колебаний математического маятника в поле силы тяжести не зависит от его массы и амплитуды колебаний (угла начального отклонения). Он установил также, что период колебаний прямо пропорционален
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле Гюйгенса:
При углах отклонения математического маятника погрешность формулы Гюйгенса не превышает 1 %.
Отклонение маятника от положения равновесия будем характеризовать углом который нить образует с вертикалью. Из второго закона Ньютона следует (см. рис. 182):
Смещение маятника вдоль дуги где угол выражен в радианах.
Возвращающей силой в данном случае является проекция на касательную к дуге силы тяжести (см. рис. 182), которая определяется по формуле
Заметим, что при малых углах длина дуги АВ = х = очень мало отличается от длины хорды так как при малых
Для небольших углов (до 10°) значения различаются меньше чем на 1 %. Поэтому для таких углов равенство является очень хорошим приближением.
Используя полученное соотношение между координатой х и углом находим Подставляем его в выражение для проекции силы:
Таким образом, уравнение движения маятника запишется в виде
Поскольку полученное уравнение совпадает с уравнением гармонических колебаний то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой
Как видно из этой формулы, циклическая частота не зависит от массы маятника и амплитуды его колебаний, а определяется только его длиной и ускорением свободного падения.
В общем случае, когда маятник находится в однородных полях нескольких сил, для определения периода колебаний следует ввести «эффективное ускорение» характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
Особенности кинетической энергии при вращении
Сравним формулу кинетической энергии при вращении с формулой кинетической энергии тела для прямолинейного движения:
$$E_k ={v^2 m \over 2}$$
Можно видеть их близость. Но, в формуле для вращения для материальной точки присутствует дополнительный множитель – радиус. Его необходимость объясняется тем, что при повороте на один и тот же угол, материальная точка, расположенная на более далеком расстоянии от центра вращения, проходит больший путь, по сравнению с более близкой точкой. Поэтому и ее мгновенная линейная скорость, а значит, и кинетическая энергия получается больше. Для твердых тел различной формы радиус вращения также учитывается при определении момента инерции.
В том, что у материальной точки с большим радиусом вращения кинетическая энергия больше, легко убедиться, раскручивая груз на шнуре. Если раскручивать груз с постоянной частотой (скажем, один оборот в секунду), то при малой длине шнура это сделать легко, однако, чем длиннее шнур, тем приходится прилагать больше усилий, хотя масса шнура остается постоянной.
Именно поэтому с помощью пращи камень можно метнуть дальше, чем просто рукой. Больший радиус вращения позволяет сообщить камню большую энергию.
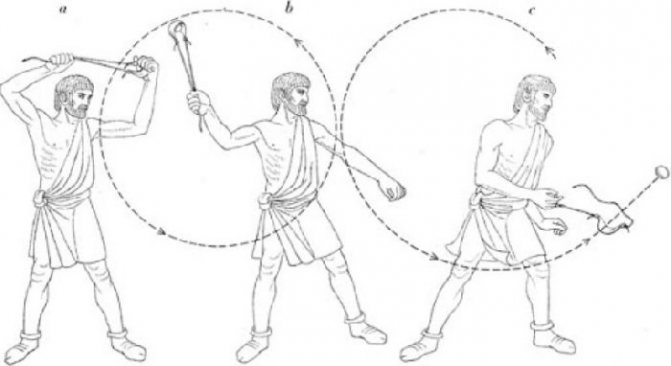
Рис. 3. Метание камня с помощью пращи.
Постигаем закон Гука
Все объекты природы могут деформироваться, т.е. менять свою форму или объем, под действием приложенной силы. Если такие деформации (т.е. изменения) исчезают после прекращения действия приложенной силы, то они называются упругими. Упругость играет важную роль в технике. Упругие пружины используются для гашения удара при посадке космического корабля на поверхность планеты. Свернутые в спираль упругие пластины применяются в заводных механизмах часов. Даже в мышеловке используется упругая деформация пружины.
Еще в XVII-M веке английский физик Роберт Гук, изучая упругие свойства разных материалов, вывел закон, названный его именем. Согласно закону Гука, для упругого деформирования материала требуется приложить силу, величина которой прямо пропорциональна его деформации. Например, чтобы растянуть пружину на величину \( x \), потребуется приложить внешнюю силу \( F_{вн} \), которая равна:
где \( k \) — это коэффициент пропорциональности.
Точнее говоря, вектор деформации \( \mathbf{x} \) всегда направлен противоположно силе сопротивления пружины (или силе упругости) \( \mathbf{F} \), а потому в векторную формулировку закона Гука обычно входит знак “минус”:
Растягиваем и сжимаем пружины
В реальном мире, помимо упругих деформаций, имеются еще и пластические деформации. Так называют деформации, которые остаются в объекте, хотя бы частично, даже после прекращения действия внешних сил. Если сила не превосходит некоторой известной величины, которая называется пределом упругости, то возникающая деформация будет пластической. Предел упругости имеет разные значения для разных материалов. Если деформируемый объект, например пружина, испытывает только упругие деформации, то его называют идеально упругим, например, идеально упругой пружиной. Коэффициент пропорциональности \( k \) в законе Гука \( F=kx \) называется коэффициентом упругости объекта, который зависит от материала объекта, его размеров и измеряется в Н/м.
Допустим, вам нужно спроектировать подвеску автомобиля массой 1000 кг, состоящую из 4 пружин, которые могут идеально упруго деформироваться на расстояние 0,5 м. Каким коэффициентом упругости должна обладать пружина, чтобы выдержать вес автомобиля?
Вес автомобиля равен \( mg \), где \( g \) — это ускорение свободного падения под действием силы гравитационного притяжения. Это значит, что на каждую пружину приходится вчетверо меньшая нагрузка \( mg/4 \).
Определим упругую деформацию пружины под действием этой нагрузки по формуле закона Гука:
т.е. коэффициент упругости равен:
Подставляя значения, получим:
Итак, чтобы выдержать вес автомобиля, потребуется пружина с коэффициентом упругости равным 4,9·103 Н/м. Не забудьте, что каждый элемент подвески автомобиля должен обладать определенным запасом прочности, чтобы выдерживать непредсказуемые превышения нагрузки, например на ухабах. Однако эта задача выходит за рамки данного курса.
Изучаем особенности закона Гука
Как уже упоминалось выше, в векторную формулировку закона Гука обычно входит знак “минус”:
Таким образом, знак “минус” выражает следующую особенность упругой деформации: сила упругости всегда противоположна деформации. На рис. 12.1 схематически показаны направления силы упругости и деформации при сжатии и растяжении пружины.
Как видите, при отсутствии растяжении или сжатия нет и деформации (см. схему А на рис. 12.1). Если пружина сжимается влево, то сила упругости направлена вправо (см. схему Б на рис. 12.1), а если пружина растягивается вправо, то сила упругости направлена влево (см. схему В на рис. 12.1).
Вопрос 5
Текст вопроса
Конденсатор колебательного контура заряжают от источника постоянного напряжения, а затем замыкают на катушки с различными индуктивностями: L 1, L 2, L 3. Подберите во втором столбце таблицы слова, правильно характеризующие изменения параметров гармонических колебаний в колебательном контуре при уменьшении индуктивности катушек в таких опытах
Читать также: Как переточить цепь для продольного пиления
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
| Амплитуда колебаний заряда конденсатора | Частота колебаний | Амплитуда колебаний силы |
Концепция и классификация
Ещё в древности энергию определяли как свойство или способность, которые тела и вещества должны производить вокруг себя и которые во время преобразований обмениваются через два механизма: в форме работы или тепла. Правда, тогда еще не знали, что таким образом выполняется закон сохранения энергии. Но кроме физических изменений, проявляющихся, например, в подъёме объекта, его транспортировке, деформации или нагревании, энергия также присутствует в химических изменениях, таких как сжигание куска дерева или разложение воды электрическим током.
Энергия — это способность тела работать, а также сила, которая выполняет работу. Она может быть представлена в виде различных переходных форм:
В физике самая важная форма называется механической энергией. Это сумма и определение потенциальной и кинетической энергии, формула которой: E = Ek + Wp.
Кинетическая энергия – понятие и определение
Определение
Кинетическая энергия – это способность движущегося тела совершать определенную работу.
Например, движущийся автомобиль способен снести находящееся перед ним препятствие, а падающий камень – оставить вмятину на металлической пластинке.
Кинетическая энергия зависит от скорости движения и массы тела. Она описывается формулой:
\(E_k=\frac{m\nu^2}2\)
Единицей измерения кинетической энергии является Джоуль (Дж).
Проведя простые преобразования, легко вывести формулы для вычисления массы тела и скорости движения:
\(m=\frac{2E_k}{\nu^2}\)
\(\nu=\sqrt{\frac{2E_k}m}\)
Из основной формулы видно: во сколько раз изменяется масса тела, во столько раз изменяется и величина кинетической энергии. Например, если масса будет уменьшена или увеличена в 5 раз, то и величина кинетической энергии станет соответственно меньше или больше в 5 раз.
При увеличении скорости кинетическая энергия увеличивается в квадратичной зависимости. Допустим, скорость движения тела стала в 6 раз больше. Соответственно его кинетическая энергия возросла в 36 раз.
Формула кинетической энергии тела справедлива только для скоростей значительно меньших, чем скорость света. Если же скорость движения приближается к 300 000 км/с, то тут начинает действовать теория относительности, созданная Альбертом Эйнштейном.
Кинетическая энергия зависит от особенностей рассмотрения системы. Если тело принимают как макроскопический объект, то оно будет обладать внутренней энергией. В этом случае кинетическая энергия возникнет только в момент его движения.
Это же тело можно рассматривать и с микроскопической точки зрения. Тепловое движение атомов и молекул обуславливает внутреннюю энергию тела. В то же время средняя кинетическая энергия этого движения пропорциональна абсолютной температуре тела. Коэффициент этой пропорциональной зависимости называется постоянной Больцмана.
Кинетическая энергия атомов и молекул при рассмотрении тела на микроскопическом уровне описывается формулой:
\(E_k=\frac32kT\)
где \(k\) – это постоянная Больцмана.
Энергия движения
Кинетическая энергия тела — это та, которой тело обладает благодаря своему движению. Её определяют как силу, необходимую для ускорения тела определённой массы от покоя до максимальной указанной скорости. Как только достигается ускорение, тело сохраняет энергию, если скорость не изменяется. Чтобы тело вернулось в состояние покоя, необходима отрицательная работа той же величины.
Единица измерения кинетической энергии — джоуль. Обычно она обозначается буквой E c или E k. Расчёт мощности измеряется по-разному. Для того чтобы найти её количество можно использовать онлайн-калькулятор.
История и определение
Прилагательное «кинетический» в названии произошло от древнегреческого слова кίνησις kinēsis, что означает «движение».
Идею связи классической механики и кинематической энергии впервые выдвинули Готфрид Вильгельм Лейбниц и Даниэль Бернулли. Учёный Грейвсанд из Нидерландов предоставил экспериментальное подтверждение этой связи.
Но первые теоретические выкладки этих идей приписаны Гаспар-Гюстав Кориолису, который в 1829 году опубликовал статью, где была изложена математика этого процесса. Сам термин появился в 1849 году благодаря Уильяму Томсону, более известному как лорд Кельвин.
Теорема о кинетической энергии гласит: изменение кинетической силы тела равно работе равнодействующей всех сил, действующих на тело. Эта теорема справедлива независимо от того, какие силы действуют на тело.
Часто различают кинетическую силу поступательного и вращательного движения. Как и любая физическая величина, которая является функцией скорости, она не только зависит от внутренней природы этого объекта, но также зависит от отношений между объектом и наблюдателем (в физике наблюдатель формально определяется классом определённая система координат, называемая инерциальной системой отсчёта).
Эта энергия деградирует и сохраняется в каждой трансформации, теряя способность совершать новые трансформации, но она не может быть создана или разрушена, только трансформирована, поэтому её сумма во вселенной всегда постоянна.
Кинематика системы частиц
Для частицы или для твёрдого тела, которое не вращается, кинетическая энергия падает до нуля, когда тело останавливается. Однако для систем, которые содержат много частиц с независимыми движениями, это не совсем верно.
Для твёрдого тела, которое вращается, полная кинетическая сила может быть разбита на две суммы: энергия перемещения, связанная со смещением центра масс тела в пространстве, и вращения (с вращательным движением с определённой угловой скоростью).
Работа и потенциальная энергия тела, поднятого над Землей
Величина потенциальной энергии зависит от выбора нулевого уровня энергии. В поле тяготения Земли нулевым уровнем энергии обладает тело, находящееся на поверхности планеты.
Работа силы тяжести
Работа силы тяжести равна изменению потенциальной энергии тела, взятому с противоположным знаком:
A = – ∆Ep = –(mgh – mgh) = mg(h – h)
Если тело поднимается, сила тяжести совершает отрицательную работу. Если тело падает, сила тяжести совершает положительную работу.
Пример №3. Шарик массой 100 г скатился с горки длиной 2 м, составляющей с горизонталью угол 30о. Определить работу, совершенную силой тяжести.
Сначала переведем единицы измерения в СИ: 100 г = 0,1 кг. Под действием силы тяжести положение тела относительно Земли изменилось на величину, равную высоте горки. Высоту горки мы можем найти, умножим ее длину на синус угла наклона. Начальная высота равна высоте горки, конечная — нулю. Отсюда:
A = mg(h – h) = 0,1∙10(2∙sin30o – 0) =2∙0,5 = 1 (Дж)
Потенциальная энергия протяженного тела
Работа силы тяжести
Потенциальная энергия протяженного тела выражается через его центр масс. К примеру, чтобы поднять лом длиной l и массой m, нужно совершить работу равную:
A = mgh
где h — высота центра массы лома над поверхностью Земли. Так как лом однородный по всей длине, его центр масс будет находиться посередине между его концами, или:
Отсюда работа, которую необходимо совершить, чтобы поднять этот лом, будет равна:
Пример №4. Лежавшую на столе линейку длиной 0,5 м ученик поднял за один конец так, что она оказалась в вертикальном положении. Какую минимальную работу совершил ученик, если масса линейки 40 г?
Переведем единицы измерения в СИ: 40 г = 0,04 кг. Минимальная работа, необходимая для поднятия линейки за один конец, равна:
Работа и изменение потенциальной энергии упруго деформированного тела
Вспомним, что работа определяется формулой:
A = Fs cosα
Когда мы сжимаем пружину, шарик перемещается в ту же сторону, в которую направлена сила тяги. Если мы растягиваем ее, шарик перемещается так же в сторону направления силы тяги. Поэтому вектор силы упругости и вектор перемещения сонаправлены, следовательно, угол между ними равен нулю, а его косинус — единице:
Модуль силы тяги равен по модулю силе упругости, поэтому:
Перемещение определяется формулой:
s = x – x
Следовательно, работа силы тяги по сжатию или растяжению пружины равна:
Но известно, что потенциальная энергия упруго деформированного тела равна:
Следовательно, работа силы, под действием которой растягивается или сжимается пружина, равна изменению ее потенциальной энергии:
Контрольные вопросы
Что называется деформацией? Какие деформации называются упругими? Приведите примеры упругих деформаций.
Какова физическая сущность упругих сил?
Сформулируйте закон Гука? Когда он справедлив?
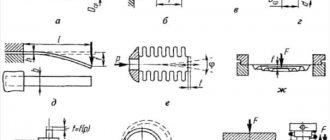
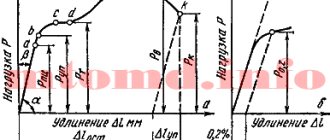
Дайте объяснение качественной диаграмме напряжений. Что такое предел пропорциональности, упругости и прочности?
Что такое упругий гистерезис и упругое последействие?
Каков физический смысл модуля Юнга и модуля сдвига?
Что такое упругое последействие?
Выведите выражения для деформаций при всестороннем растяжении.
Что называется коэффициентом Пуассона?
Определите энергию деформированного тела.
Что называется плотностью упругой энергии? Получите формулы этой энергии при растяжении и сдвиге.
А. mv²/2 Б.mv В.mgh Г. kx²/2 2. Каково наименование единицы кинетической энергии, выраженное через основные единицы Международной системы? А.1кг·м Б.1 кг·м/с В.1кг·м²/с Г.1кг·м²/с² 3. Чему равна кинетическая энергия тела массой 3 кг, движущегося со скоростью 4 м/с?
Читать также: Почему стиральная машинка сильно вибрирует при отжиме
А. 6 Дж. Б. 12 Дж. В.24Дж. Г.48Дж.
4. Как изменится потенциальная энергия упруго деформированного тела при увеличении его деформации в три раза?
À. Не изменится. Б. Увеличится в 3 раза. . Увеличится в 9 раз. Г. Увеличится в 27 раз.
Два автомобиля с одинаковыми массами m движутся со скоростями v и 3v относительно Земли в одном направлении. Чему равна кинетическая энергия второго автомобиля в системе отсчета, связанной с первым автомобилем?
А.mv² Б.2mv² В.3mv² Г.4mv² 6.Каково наименование единицы работы, выраженное через основные единицы Международной системы? А.1кг Б.1кг·м/с В.1кг·м/с² Г.1кг·м²/с² 7.По какой формуле следует рассчитывать работу силы F, если между направлением силы и перемещения S угол a ? А.(F/S)·cosα Б.F·S·sinα В.F·S·cosα Г.(F·S)·sinα
9. Тело массой 1 кг силой 30 Н поднимается на высоту 5 м. Чему равна работа этой силы?
А .0 Дж. Б. 50 Дж. В. 100 Дж. Г. 150 Дж.
Кинетическая энергия тела в момент бросания равна 200 Дж. Определите, до какой высоты от поверхности земли может подняться тело, если его масса равна 500 г.
Башенный кран поднимает бетонную плиту массой 2 т на высоту 15 м. Чему равна работа силы тяжести, действующей на плиту?
Максимальная кинетическая энергия груза
Для простого пружинного маятника полную энергию груза в любой момент времени можно выразить как
- $E_p$ — потенциальная энергия,
- $E_k$ — кинетическая энергия,
- $m$ — масса,
- $v$ — моментальная скорость,
- $k$ — коэффициент упругости,
- $x$ — приращение длины пружины в данный момент.
Задай вопрос специалистам и получи ответ уже через 15 минут!
Максимальную кинетическую энергию можно вычислить как
где $v_ $ — максимальная скорость груза. Однако измерить ее на практике сложно. Проще, опираясь на постоянство суммы кинетической и потенциальной энергий, определить максимальную потенциальную (когда кинетическая равна нулю). Поскольку справедливо и обратное, можно записать:
где $x_ $ — максимальное приращение растяжения пружины. Его легко измерить, а коэффициент упругости посмотреть в справочнике.
Компактный груз, массой 0,5 кг прикреплен к движущейся горизонтально пружине. Ее коэффициент упругости равен 2000 $frac $. Каково было начальное приращение длины пружины, если его максимальная скорость во время колебаний составляет 1 $frac $?
Из условий задачи можно найти максимальную кинетическую энергию груза:
Выразив максимальную потенциальную энергию через приращение длины пружины, составим равенство:
Ответ: $approx 1,6 мм$.
Так и не нашли ответ на свой вопрос?
Просто напиши с чем тебе нужна помощь
Груз математического маятника массой 10 г совершает гармонические колебания. При этом скорость v груза изменяется с течением времени t по закону v = 2sin ( 0,5πt )
Чему равна максимальная кинетическая энергия груза при таких колебаниях?
помогите пожалуйста — вот я знаю Е кин = mv^2/2 но от куда я должна взять значения. что взять из этой формулы? ( v = 2sin ( 0,5πt )) 2 — это скорость, которую можно подставить в Е? 0,5 это w , с этим что то сделать?
оу. не я получила 0,02. Тааак. а в каких это единицах? это равно 2м дж?
При свободных механических колебаниях кинетическая и потенциальная энергии изменяются периодически. При максимальном отклонении тела от положения равновесия его скорость, а следовательно, и кинетическая энергия обращаются в нуль. В этом положении потенциальная энергия колеблющегося тела достигает максимального значения. Для груза на горизонтально расположенной пружине потенциальная энергия – это энергия упругих деформаций пружины. Для математического маятника – это энергия в поле тяготения Земли.
Когда тело при своем движении проходит через положение равновесия, его скорость максимальна. В этот момент оно обладает максимальной кинетической и минимальной потенциальной энергией. Увеличение кинетической энергии происходит за счет уменьшения потенциальной энергии. При дальнейшем движении начинает увеличиваться потенциальная энергия за счет убыли кинетической энергии и т. д.
Таким образом, при гармонических колебаниях происходит периодическое превращение кинетической энергии в потенциальную и наоборот .
Если в колебательной системе отсутствует трение, то полная механическая энергия при свободных колебаниях остается неизменной.
Что такое пружинный маятник
Пружинным маятником в физике называют систему, совершающую колебательные движения под действием силы упругости.
Приняты следующие обозначения:
- m — масса тела;
- k — коэффициент жесткости пружины.
Общий вид маятника:
Особенностями пружинных маятников являются:
- Сочетание тела и пружины.
Массой пружины обычно в расчетах пренебрегают. Роль тела могут играть различные объекты. На них оказывают действие внешние силы. Груз может крепиться разными способами. Витки пружины, которыми она начинается и заканчивается, изготавливают с учетом повышенной нагрузки; - У любой пружины есть исходное положение, предел сжатия и растяжения.
При максимальном сжатии зазора между витками нет. Когда она максимально растянута, возникает необратимая деформация; - Полная механическая энергия появляется с началом процесса обратимого деформирования.
В этот момент на объект не оказывает действие сила упругости; - Колебательные движения происходят под влиянием силы упругости.
Масштаб влияния определяется несколькими причинами (тип сплава, расположение витков и т. д.). Так как может происходить и сжатие и растяжение, можно сделать вывод, что сила упругости действует в двух противоположных направлениях; - От массы тела, величины и направления прикладываемой силы зависит скорость в плоскости его перемещения.
Например, если подвесить груз к пружине и, растянув её, отпустить, то груз будет перемещаться в двух плоскостях: вертикально и горизонтально.
Момент силы и момент импульса относительно оси
Рассмотрение деформации пружины проводится также с учетом момента силы и импульса относительно оси. Эти два параметра позволяют рассчитать все требуемые показатели с более высокой точностью. Довольно распространенным вопросом можно назвать чему равен момент силы – векторная величина, которая определяется векторному произведению радиуса на вектор приложенной силы.
Момент импульса – величина, которая применяется для определения количества вращательного движения.
Среди особенностей подобного показателя можно отметить следующее:
- Масса вращения. Объект может характеризоваться различной массой.
- Распределение относительно оси. Ось может быть расположена на различном расстоянии от самого объекта.
- Скорость вращения. Это свойство считается наиболее важным, в зависимости от конструкции он может быть постоянным или изменяться.
Расчет каждого показателя проводится при применении соответствующей формулы. В некоторых случаях проводится измерение требуемых вводных данных, без которых провести вычисления не получится.
Сила: что это за величина
В повседневной жизни мы часто встречаем, как любое тело деформируется (меняет форму или размер), ускоряется или тормозит, падает. В общем, чего только с разными телами в реальной жизни не происходит. Причиной любого действия или взаимодействия является сила.
Сила — это физическая векторная величина, которую воздействует на данное тело со стороны других тел.
Она измеряется в Ньютонах — это единица измерения названа в честь Исаака Ньютона.
Сила — величина векторная. Это значит, что, помимо модуля, у нее есть направление. От того, куда направлена сила, зависит результат.
Вот стоите вы на лонгборде: можете оттолкнуться вправо, а можете влево — в зависимости от того, в какую сторону оттолкнетесь, результат будет разный. В данном случае результат выражается в направлении движения.

Упругие деформации — источник энергии
Если к пружине с жесткостью k на горизонтальной поверхности присоединить грузик, вытянуть пружину, а затем отпустить грузик, то под действием силы упругости пружины грузик придет в движение и сдвинется на определенное расстояние. Попробуем снова вычислить работу, которую совершит сила упругости при удлинении пружины от начального положения x1 до конечного х2.
Рис. 3. Потенциальная энергия пружины:.
Сила упругости будет изменяться в зависимости от размера деформации. Работа, произведенная силой упругости Fу при смещении пружины из точки x1 в точку x2, будет равна:
$A = F_у (x_1 – x_2)$ (10).
Сила упругости по закону Гука прямо пропорциональна деформации пружины, и среднее ее значение равно:
$F_{уср} = k*{ (x_1 + x_2)\over 2}$ (11).
Подставив в (10) вместо Fу значение из уравнения (11), получаем:
$A = k*{ (x_1 + x_2)\over 2} *(x_1 – x_2)= {k *( x_1^2 – x_2^2)\over 2}$ (12).
Уравнение (12) можно представить в несколько другом виде:
$A = {k*x_1^2\over 2} – { k*x_2^2\over 2}$ (13).
Из уравнения (13) видно, что работа равна разности величины потенциальной энергии Ep в точках х1и х2:
$Ep = {k*x^2\over 2}$ (14),
Из уравнений (13) и (14) следует, что работа силы упругости равна изменению потенциальной энергии пружины. Если в конечной точке х2=0, т.е. пружина не деформирована, то:
$Ep = A$ (15).
Значит потенциальная энергия деформированного тела равна работе, совершенной силой упругости при переходе тела в состояние с нулевой деформацией.
Причина возникновения сил упругости кроется во взаимодействии атомов и молекул тела. При сжимании возникают силы отталкивания между атомами, а при растяжении — силы притяжения, которые стремятся восстановить начальные размеры. Атомы и молекулы в своем составе имеют электроны и протоны — частицы с электрическими зарядами. В результате деформаций изменяются взаимные положения атомов и молекул. Электрические силы стремятся вернуть атомы в начальное положение. Так возникает сила упругости.
Модули упругости различных тел рассчитываются с помощью специальных математических моделей на основании экспериментальных данных. Значения модулей упругости для различных материалов приведены в справочных таблицах.
Физика
3.4. Механическая энергия
3.4.2. Потенциальная энергия
Потенциальная энергия — это механическая энергия системы тел, определяемая их (или частей одного тела) взаимным расположением.
Потенциальная энергия деформированной пружины
Деформированная пружина (сжатая или растянутая) (рис. 3.7) обладает потенциальной энергией, которая определяется формулой
W p = k ( Δ l ) 2 2 ,
где k — коэффициент жесткости (упругости) пружины; ∆l — величина абсолютной деформации пружины (удлинения или сжатия).
Рис. 3.7
Потенциальная энергия недеформированной пружины равна нулю.
Следует отметить, что потенциальная энергия деформированной пружины всегда является положительной величиной.
В Международной системе единиц потенциальная энергия деформированной пружины измеряется в джоулях (1 Дж).
Потенциальная энергия взаимодействия тела и Земли
Тело, расположенное на расстоянии h над поверхностью Земли (или под ее поверхностью), обладает потенциальной энергией, которая определяется формулой
Wp = mgh + C,
где m — масса тела; g — модуль ускорения свободного падения.
Выбор константы C является условным и зависит от конкретной задачи; часто указанную константу выбирают таким образом, чтобы на поверхности планеты потенциальная энергия взаимодействия тела и планеты обращалась в ноль.
Следует отметить, что потенциальная энергия взаимодействия тела и Земли может быть как положительной, так и отрицательной величиной.
В Международной системе единиц потенциальная энергия тела, поднятого на некоторую высоту относительно поверхности Земли, измеряется в джоулях (1 Дж).
Пример 26. Две пружины с одинаковыми коэффициентами жесткости по 1,0 кН/м соединили последовательно. Составную пружину растянули на 10 см. Во сколько раз увеличится потенциальная энергия деформации, если эти же пружины соединить параллельно, а величину деформации системы оставить прежней? Рассчитать потенциальную энергию пружин при последовательном и параллельном соединении, считая деформацию составной пружины одинаковой и равной 10 см.
Решение. Потенциальная энергия составной пружины определяется формулой
W p = k общ ( Δ l ) 2 2 ,
где kобщ — общий коэффициент жесткости составной пружины; ∆l — величина деформации пружины.
Коэффициент жесткости составной пружины определяется по-разному:
для N одинаковых пружин, соединенных последовательно,
k общ 1 = k 0 N ;
для N одинаковых пружин, соединенных параллельно,
kобщ2 = Nk0,
где k0 — коэффициент жесткости одной пружины; N = 2 — количество соединенных пружин.
Потенциальная энергия составной пружины вычисляется по формулам:
для N одинаковых пружин, соединенных последовательно,
W p 1 = k общ 1 ( Δ l ) 2 2 = k 0 ( Δ l ) 2 2 N ;
для N одинаковых пружин, соединенных параллельно,
W p 2 = k общ 2 ( Δ l ) 2 2 = N k 0 ( Δ l ) 2 2 .
Отношение потенциальных энергий
W p 1 W p 2 = k 0 ( Δ l ) 2 2 N 2 N k 0 ( Δ l ) 2 = 1 N 2
определяется только количеством пружин и не зависит от деформации составной пружины.
Рассчитаем потенциальную энергию составной пружины, состоящей из двух одинаковых пружин,
соединенных последовательно:
W p 1 = k 0 ( Δ l ) 2 2 N = 1,0 ⋅ 10 3 ( 10 ⋅ 10 − 2 ) 2 2 ⋅ 2 = 2,5 Дж;
соединенных параллельно:
W p 2 = N k 0 ( Δ l ) 2 2 = 2 ⋅ 1,0 ⋅ 10 3 ( 10 ⋅ 10 − 2 ) 2 2 = 10 Дж.
Отношение указанных потенциальных энергий равно
W p 1 W p 2 = 1 N 2 = 1 2 2 = 4 .
Следовательно, при одинаковой деформации потенциальная энергия пружины, составленной из двух одинаковых параллельно соединенных пружин, в 4 раза больше потенциальной энергии пружины, составленной из двух одинаковых последовательно соединенных пружин.
Пример 27. Какой энергией обладает тело массой 500 г на вершине горы относительно дна озера, находящегося у подножия горы? Высота горы составляет 1,50 км, а глубина озера 250 м.
Решение. Потенциальная энергия тела, поднятого на некоторую высоту, определяется формулой
Wp = mgh,
где m — масса тела; g — модуль ускорения свободного падения; h — высота, на которую поднято тело над определенным уровнем, характеризуемым нулевым значением потенциальной энергии.
Выберем нулевой уровень потенциальной энергии (Wp = 0) на дне озера так, как показано на рисунке.
Тогда высота, на которую поднято тело над указанным уровнем, является суммой:
h = h2 + h2,
где h2 = 1,50 км — высота горы; h2 = 250 м — глубина озера.
Потенциальная энергия тела относительно дна озера определяется выражением
Wp = mg(h2 + h2).
Расчет дает значение:
W p = 500 ⋅ 10 − 3 ⋅ 10 ⋅ ( 1,50 + 0,25 ) ⋅ 10 3 = 8,75 ⋅ 10 3 Дж = 8,75 кДж.
Закон сохранения механической энергии
Согласно установленным законам механическое воздействие консервативной механической системы сохраняется во времени. Этот момент определяет то, что потенциальная энергия деформированной пружины не может возникнуть сама или исчезнуть куда-нибудь. Именно поэтому для ее создания нужно приложить соответствующее усилие.
Рассматриваемый закон относится к категории интегральных равенств. Эта закономерность определяет то, что он складывается их действия дифференциальных законов, является свойством или признаком совокупного воздействия.
Для проведения соответствующих расчетов должна применяться определенная формула. Сила, с которой оказывается воздействие, не является постоянной. Именно поэтому для ее вычисления применяется графический метод. Самая простая зависимость может быть описана следующим образом: F=kx. При применении подобной зависимости построенная координатная линия будет представлена прямой линией, которая расположена под углом относительно системы координат.
Приписать подобному устройству потенциальную энергию можно только в том случае, если она равна максимальной работе и не зависит от условной траектории движения. Проведенные исследования указывают на то, что подобная работа подчиняется закону Гука. Для определения основного показателя применяется следующая формула: U=kk2/2.
Для деформирования витков к ним должно быть приложено определенное усилие, так как в противном случае кинетическая сила не возникнет.
Потенциальная энергия
Потенциальная энергия — это энергия взаимодействия тел или частей тела между собой или с внешними полями. Основной физический смысл имеет не само потенциальной энергии, а её изменение. Потенциальная энергия принимается равной нулю для некоторой конфигурации тел в пространстве, выбор которой определяется удобством дальнейших вычислений. Любая физическая система стремится к состоянию с наименьшей потенциальной энергией.
Корректное определение потенциальной энергии может быть дано только в поле сил, работа которых зависит только от начального и конечного положения тела, но не от траектории его. Такие силы называются консервативными (потенциальными).
Например, работа силы тяжести не зависит от траектории перемещения тела и равна mgh.
Основные параметры гармонических колебаний
a) период колебания – время одного полного колебания:
)
б) частота колебания – количество колебаний, совершаемых за 1 секунду:
Единица c) циклическая частота – количество колебаний за секунд:
С учетом формул (5.5) и (5.6) уравнение гармонических колебаний (5.2) можно записать в следующей форме.
Большинство величин, количественно описывающих гармонические колебания, смещения которых с течением времени меняются по закону синусов или косинусов (скорость, ускорение, кинетическая и потенциальная энергия), тоже гармонически меняются. Это подтверждается следующими графиками и уравнениями:
Пример решения задачи:
Точка совершает гармоническое колебательное движение. Максимальное смещение и скорость соответственно равны 0,05 м и 0,12 м/с. Найдите максимальное ускорение и скорость колебательного движения, а также ускорение точки в момент, когда смещение равно 0,03 м.
Дано:
Найти:
Формула и решение: