Spread the love
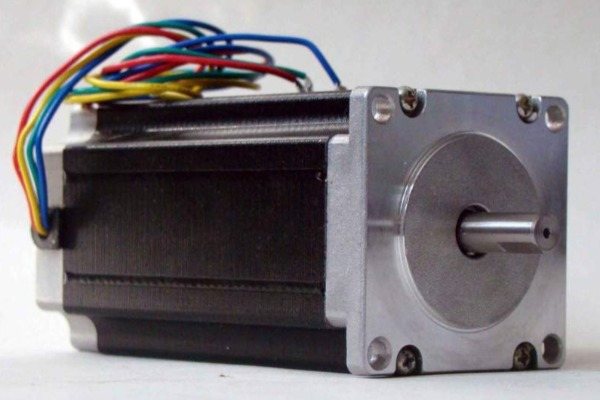
Чтобы понимать какой шаговый двигатель для ЧПУ станка вам необходим, нужно знать требования к крутящему моменту и частоте вращения (скорости). Лучший шаговый двигатель будет способен обеспечить необходимый крутящий момент и при этом быть достаточно быстрым. Очень легко переплатить за слишком большой шаговый двигатель или выбрать слабый. Это руководство может помочь вам выбрать шаговый двигатель, который вам нужен для вашего приложения с ЧПУ.
Как специалиста по ЧПУ и консультанта, меня часто спрашивают рекомендации по шаговым двигателям от людей, которые хотят сделать ЧПУ или заменить двигатель в существующем ЧПУ.
Я предлагаю им свои лучшие варианты в зависимости от категории шагового двигателя:
- STEPPERONLINE NEMA 17 Stepper Motor
- STEPPERONLINE NEMA 23 Stepper Motor
- TOAUTO Integrated Closed-Loop NEMA 23 Stepper Motor with Driver
- Hobby-Unlimited NEMA 34 Stepper motor
Вот лучшие шаговые двигатели, доступные сегодня [2021] для приложений ЧПУ.
| Шаговый двигатель | Пиковый ток | Удерживающий крутящий момент |
| 1. Шаговый двигатель STEPPERONLINE NEMA 17 | 2А | 84 унций дюйм |
| 2. Шаговый двигатель Usongshine NEMA 17 | 1,5 А | 60 унций в |
| 3. Шаговый двигатель STEPPERONLINE NEMA 23 | 2,8 А | 178,5 унций дюйм |
| 4. Шаговый двигатель STEPPERONLINE NEMA 23 (3A) | 3,0 А | 269 унций в дюймах |
| 5. Шаговый двигатель NEMA 23, 4,2 А с высоким крутящим моментом | 4,2 А | 425 унций дюйм |
| 6. Шаговый двигатель TOAUTO с замкнутым контуром NEMA 23 | 3,0 А | 283 унций дюйм |
| 7. Комплект шагового двигателя RATTM NEMA 23 | 4,0 А | 425 унций дюйм |
| 8. Шаговый двигатель Hobby-Unlimited NEMA 34 | 6.0A | 1200 унций в |
Лучшие шаговые двигатели для ЧПУ
Какие критерии определяющие для выбора?
Надо помнить о том, что, по сравнению с обычными двигателями, шаговые требуют более сложных схем для управления. А критериев не так уж много.
- Параметр индуктивности.
Первый шаг – определение квадратного корня из индуктивности обмотки. Результат потом умножаем на 32. Значение, полученное в качестве итога, потом требуется сравнивать с напряжением источника, от которого питание идёт к драйверу.
Эти числа не должны отличаться друг от друга слишком сильно. Мотор будет греться и шуметь слишком сильно, если напряжение питания больше полученного значения на 30 и больше %. Если же он меньше, то, по мере нарастания скорости, крутящий момент убывает. Чем больше индуктивность – тем проще сохранить высокий крутящий момент. Но для этого надо подобрать драйвер, имеющий большое напряжение питания. Только в этом случае шаговой двигатель работает нормально.
- График того, как крутящий момент и скорость зависят друг от друга.
Это позволит понять, насколько двигатель в принципе соответствует запросам и техническому заданию.
- Параметры геометрического плана.
Особое внимание рекомендуется уделить диаметру вала, фланцу и длине двигателя.
Кроме того, следующие показатели так же рекомендуется внимательно изучить:
- Максимальный статический синхронизирующий момент.
- Момент по инерции у роторов.
- Ток внутри фазы по номиналу.
- Общее сопротивление фаз омического типа.
Классификация шаговых двигателей для ЧПУ
Советские модели
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Параметр | ДШИ-200-2 | ДШИ-200-3 |
| Потребляемая мощность | 11.8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0.54 кг | 0.91 кг |
При выборе следует обратить внимание на наличие индекса ОС. Это особая серия с военной приемкой. Имеет более высокое качество исполнения, чем обычные модели.
Китайские модели
Примеры китайских шаговых двигателей для ЧПУ и их характеристики представлены ниже.
| Параметр | Модель | ||
| JKM Nema 17 42mm Hybrid Stepper Motor | JK42HS48-2504 | JK42HS40-1704 | |
| Длина, мм | 48 | 40 | 34 |
| Ток питания в фазе, А | 2.5 | 1.7 | 1.33 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Масса, кг | 0.34 | 0.32 | 0.22 |
Биполярные шаговые двигатели для ЧПУ от CNC Technology
| Параметр | Модель | ||
| 86HS156-5004 | 57HS76-3004 | 42HS48-1704A | |
| Ток питания в фазе, А | 5 | 3 | 1.7 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Индуктивность, мГн | 6 | 3.5 | 2.8 |
| Диаметр вала | 14 | 8 | 5 |
Зная критерии выбора и ориентируясь в предложениях по шаговым двигателям на рынке можно подобрать подходящую модель для станка ЧПУ. Главное – покупать у проверенных поставщиков.
О разновидностях двигателей
Для станка используемая разновидность шаговых двигателей – параметр не менее важный, чем остальные. Каждая модель наделена своими особенностями.
- Биполярные чаще всего применяются совместно с ЧПУ.
Главное достоинство – возможность легко выбрать новый драйвер, если старый выходит из строя. На малых оборотах при этом сохраняется высокое удельное сопротивление.
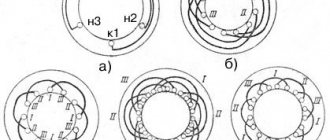
- Трёхфазные.
Для них характерна высокая скорость. Актуальны, если именно данному параметру уделяют больше всего внимания в случае выбора.
- Униполярные.
Это несколько видов биполярных двигателей, которые отличаются друг от друга и подбираются в зависимости от подключения обмотки.
Дополнительные рекомендации по выбору
Кроме всех перечисленных показателей, стоит учитывать еще и следующие параметры:
- Стоимость. Рекомендуется внимательно изучить цену и характеристики моторов. Иногда при одинаковых параметрах разница в цене значительная. Также не стоит ориентироваться на известную фирму. Зачастую за имя производителя добавляется до 30 % стоимости.
- Сложность настройки. Для начинающих пользователей станков с ЧПУ лучше выбирать механизм попроще. В сложном двигателе можно запутаться и сломать его.
- Назначение устройства. От того, с какой целью будет применяться станок, зависит и характеристика двигателя.
- Схема подключения. Она зачастую определяется от количества проводов.
- Наличие центр-крана. В этом случае обмотка идет совместно с проводами (3 шт.).
При выборе шагового двигателя стоит учитывать все вышеперечисленные параметры. Тогда и мотор прослужит намного дольше, и работать с таким двигателем будет проще и быстрее. При покупке стоит проверять на наличие заводских браков.
- 16 ноября 2020
- 1664
По поводу резонанса при средних частотах
Шаговые двигатели связаны с возникновением сильного резонанса. По сути, они работают, как маятник с подвешенным на пружине грузиком. Роль груза выполняет ротор, а поле с магнитной энергией – пружина. Собственные колебания имеют частоту, определяемую по двум показателям:
- Инерция ротора.
- Сила тока.
Резонанс появляется, когда разность между скоростью и фазностью момента достигает 180 градусов. Это означает, что присутствует соответствие скорости и изменений внутри магнитного поля. Движение становится быстрым при позиционировании по новому шагу. Крутящий момент падает из-за того, что больше всего энергии уходит, чтобы преодолеть инерцию.
Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов. Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с2, сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Справка: силу сопротивления должен развивать привод стола на гайке шариковой винтовой передачи.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c2.
Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Совет: существуют калькуляторы для автоматического расчета мощности.
Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.
С контроллера ПУ сигналы идут к драйверу. Далее организуется управление процессом, во время которого переключаются ключи, составляющие схему с питающим напряжением. Последнее идёт с блока питания, на двигатель, проходя по ключам.
Преимущества и недостатки шагового электродвигателя
Принцип работы такого электромотора от обычного силового агрегата отличается тем, что угол поворота вала зависит от количества поступивших на агрегат импульсов. При запитанных обмотках в режиме остановки обеспечивается полноценный момент с позиционированием и возможностью дальнейшего повторения. Качественные современные модели могут обладать точностью от трех до пяти процентов от размера шага. Данная погрешность не имеет свойства пошагового накопления. Поскольку у шагового двигателя нет щеток, его можно быстро запускать, останавливать и переключать в режим реверсивного хода. Но срок его безотказной службы напрямую зависит от состояния подшипников. Позиционирование осуществляется без обратной связи. Можно даже подключить самодельный регулятор оборотов, например, чтобы обеспечивать оптимальную малую скорость редуктора для нагрузки, приложенной непосредственно к его валу. Диапазон перекрываемых скоростей шагового электромотора может быть достаточно обширным, а скорость вращения имеет пропорциональную зависимость от частоты импульсов на входе.

Среди достоинств шаговых электродвигателей нужно особо отметить возможность скоростной регулировки и точного позиционирования без необходимости использования датчиков для связи обратной. Это важное преимущество, поскольку стоимость такого датчика современного образца может быть достаточно высокой. Но данный качественный потенциал полноценно раскрывается только в низкооборотистых системах с относительно постоянной загруженностью. При нагрузке выше величины момента данные о положении вала сбиваются, и системе уже требуется дополнительное базирование через концевой выключатель или другой подобный прибор. Оборудованные обратной связью системы такими недостатками не обладают. Они могут стабильно работать даже на высоких скоростях с периодической нагрузкой.
Также имеется ряд других минусов шаговых электромоторов:
- большая вероятность появления резонанса;
- расход энергии не снижается при уменьшении нагрузки;
- сложность работы и управления на высоких оборотах;
- малая удельная мощность;
- усложненная схема регулировки.
При проектировании некоторых систем такие электромоторы меняют на серводвигатели. Но для точного позиционирования в пределах допустимой скорости и момента лучше всего подходят именно двигатели шагового типа. При необходимости для увеличения момента здесь также можно задействовать понижающий редуктор, но такая методика применяется нечасто. В промышленном оборудовании, современной бытовой и автомобильной технике чаще задействуются коллекторные моторы.
Тем не менее силовые агрегаты шаговые имеет свою стабильную область применения, в которой они незаменимы, например:
- периферийное компьютерное оборудование;
- устройства чтения и записи оптических дисков;
- станковое оборудование с числовым программным управлением.
Помимо стандартных двухфазных моделей в быту и на производстве также используются трехфазные шаговые двигатели.
Что ещё учесть?
Центр-краном называют обычный провод. Ещё для него используют обозначения «. Часть моделей шаговых двигателей снабжаются подобными приспособлениями. Каждая обмотка идёт совместно с тремя проводами, когда речь идёт об униполярных вариантах. Два из них организуют соединение с транзисторами. Центр-кран или средний идёт прямо до источника питания или напряжения.

Два боковых провода вообще можно игнорировать, если транзисторы использовать не планируется.
Пяти- и шестипроводные модели во многом похожи друг на друга. Но внутри центральные провода выводятся в один общий кабель, вместе с остальными составляющими. Обмотки не удастся соединить друг с другом, если будут отсутствовать разрывы. Лучше всего именно средний провод соединять с другими проводниками. Тогда об эффективности и безопасности устройства можно будет не волноваться. Нужно просто брать подходящие детали.
Особенности трехфазного шагового электромотора
От стандартного двухфазного варианта 3-х фазный шаговый силовой агрегат отличается способностью показывать более равномерный момент вращения. При этом вибрация ротора и уровень шума у него заметно ниже, а возможности ускорения и торможения реализуются лучше и быстрее. Также трехфазный ШД качественнее сохраняет момент на повышенных оборотах и для его подсоединения нужно всего три провода (двухфазный ШД обычно подключается четырьмя кабелями). Поэтому устройства такого типа нашли широкое применение там, где необходимо высокоточное позиционирование с низкой вибрацией и шумом.
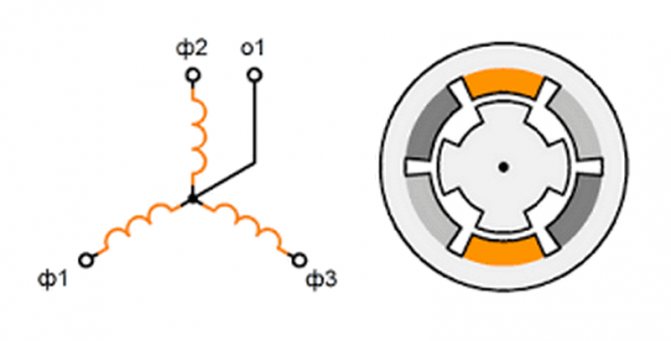
Это не имеющий щеток электромотор синхронного типа, к нескольким обмоткам которого подается электрический ток так, чтобы одна из запитанных статорных обмоток фиксировала положение ротора. Путем последовательного включения обмоток образуются так называемые шаги – перемещение ротора на определенный угол. Как уже было сказано выше, точное позиционирование вала можно получить даже без использования датчиков обратной связи. Но нужен специальный драйвер для шагового двигателя.
Таким образом, среди достоинств моделей с тремя фазами можно отметить:
- равномерность крутящего момента;
- низкие показатели вибрации вала и шума;
- лучшая способность торможения и разгона;
- качественное сбережение момента работы на повышенных скоростях.
Собранные на основе трехфазных шаговых электромоторов электроустановки и приводы отличаются стабильной и эффективной работой, а также высоким моментом кручения. Сфера применения у них практически идентична двухфазным аналогам.
Трехфазные модели
Трехфазный двигатель часто используется для линейных приводов. Показатель порогового напряжения у него колеблется в районе 5 В. Модификации с зубчатыми статорами попадаются на рынке довольно часто. Магнитопроводы у этих моделей показатель проводимости тока имеют на уровне 6 мк. Роторы делаются, как правило, из шихтовой стали. Угол шага у моделей не превышает 2.4 градуса. Момент удержания в данном случае зависит от проводимости магнитопровода. В среднем указанный параметр колеблется в районе 4 кг/см.
Передаточное число моделей равняется 1:63. По параметру сопротивления обмотки устройства сильно отличаются. Показатель минимальной индуктивности двигателей равняется 8.5 мГн. Изготавливаются устройства на четыре и шесть выводов. Купить трехфазную модификацию на рынке можно всего за 5 тыс. руб.
Самые частые вопросы по обслуживанию и эксплуатации фрезерных станков с ЧПУ
Я приобрёл фрезерный станок с ЧПУ, нужно ли устанавливать стабилизатор напряжения?
Обязательным условием бесперебойной работы промышленного оборудования является использование стабилизатора напряжения. Это может защитить вас от выхода из строя оборудования и остановки производства. В большинстве случаев выход из строя связан с пониженным напряжением, перенапряжением, пиками и выбросами напряжения в сети. Напряжение может резко отличаться от стандартных 220/380 В. Колебания напряжения очень вредны для электрической и электронной аппаратуры, приводят к её преждевременному выходу из строя, а также ухудшают характеристики функционирования.
Стабилизатор напряжения подключается между источником тока и потребителем, в нашем случае — между электросетью и фрезерным станком. Главной характеристикой стабилизатора является его мощность. Для её корректного определения необходимо оценить соответствующую мощность подключаемого потребителя. Иными словами, необходимо подсчитать — сколько станков будут питаться от стабилизатора напряжения. Их суммарная мощность, плюс некоторый запас (порядка 20%) и будут равны номинальной мощности выбираемого стабилизатора.
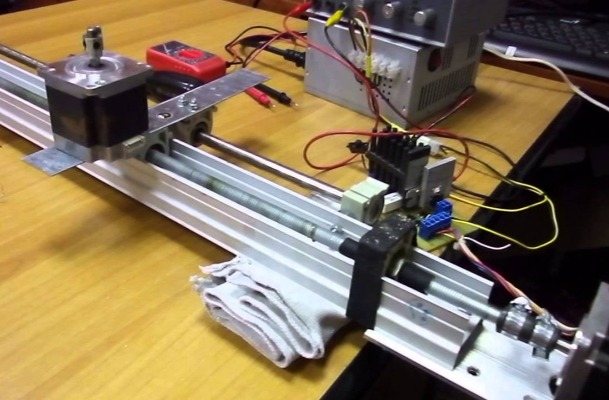
Получаемые после обработки детали получаются меньше или больше нарисованных в графическом редакторе.
Если после обработки размер детали не соответствует отображаемому в программе, то возможно нужно правильно выставить импульсы шаговых двигателей. Существует универсальная формула для расчёта:
Количество импульсов = A x B / C
А – установленный в данный момент на станке импульс; B – дистанция на которую отправляется станок; С – фактическое расстояние, которое прошёл станок.
Пример:
У нас на станке количество импульсов установлено равным 300. Отправляем станок по требуемой оси на фиксированное расстояние, например 1000 мм. Измеряем по факту пройденное станком расстояние (для примера пусть будет 900 мм).
300 x 1000 / 900 = 333,333 – это и будет правильное количество импульсов для нашего станка. Остается только ввести это число в настройках вашей системы управления. На пультах Rich Auto А11/18
данные настройки находятся во вкладке MENU – MACHINE SETUP – PULSE EQUIV.
Для системы управления NC STUDIO
данные настройки можно найти во вкладке Params, в окне
Motor Parameter
. (Окно 3)
При запуске станка и отправлении всех осей в «дом» движение происходит в противоположном направлении.
Для смены направления вращения шаговых двигателей следует сменить полярность питания одной из обмоток шагового двигателя. Это можно сделать с помощью изменения настроек в программе управления станком, либо поменять местами провода подключения шагового двигателя к драйверу (например A- и A+). В системе NC Studio
можно изменить соответствующие направления на вкладке «Params». Для этого необходимо щёлкнуть правой
кнопкой мыши по кнопке группы параметров «Machining» одновременно нажав на клавиатуре Ctrl + Shift + Alt. В появившейся группе параметров в ветке «Axis Direction» необходимо для соответствующей оси изменить значение с «1» на «-1» или наоборот.
Какую смазку выбрать для обслуживания линейных подшипников (PMI, HIWIN, ABBA)
Все направляющие, шарико-винтовые передачи и другие механические компоненты, как и все детали машин нуждаются в смазке. Смазка необходима для нормальной работы всех узлов, которые испытывают трение при движении.
Консистентная смазка на основе литиевого мыла для направляющих. Например, «Mobilux EP 2»
поставляется в тубах по 400 гр. рекомендуются для большинства типов индустриального оборудования, включая оборудование, эксплуатируемое в тяжелых условиях при высоких удельных давлениях или ударных нагрузках.
Замена графитовых пластин в пластинчато-роторном вакуумном насосе
Графитовые пластины в пластинчато-роторном вакуумном насосе являются расходным материалом, в процессе эксплуатации изнашиваются и со временем подлежат замене. Чтобы не возникало аварийных ситуаций, необходимо периодически проверять их состояние, проводить техническое обслуживание.
В первую очередь снимается пластиковая крышка кожуха вакуумного насоса. Затем внутреннее пространство вакуумного насоса тщательно продувается сжатым воздухом для предотвращения, в дальнейшем, попадания загрязнений во внутреннюю часть корпуса вакуумного насоса. Извлекая по очереди графитовые пластины, необходимо проверить их целостность и измерить ширину. Минимальная ширина графитовой пластины указана на наклейке вверху корпуса вакуумного насоса. Перед установкой графитовых пластин на место, можно продуть корпус сухим сжатым воздухом. При установке графитовых пластин следует следить за положением их рабочих кромок.
Смазка подшипника вала вакуумного насоса.
Во время контроля состояния графитовых пластин осуществляется так же и уход за подшипником вала вакуумного насоса. Для удобства, эти две операции следует выполнять одновременно, тем более что весь уход за подшипником заключается лишь в добавлении смазочного материала. Для того чтобы дополнить израсходованный смазочный материал, необходимо удалить винт с заправочного отверстия вверху крышки подшипника, выдавить в отверстие смазку из тюбика (5-10 граммов в зависимости от модели насоса) и снова завинтить винт.