Механизм возвратно-поступательного движения
Передача усилия от источника к конечному устройству может проводится самым различным образом. Возвратно поступательный механизм обладает следующими особенностями:
- В большинстве случаев он устанавливается при создании обрабатывающего оборудования, к примеру станка, у которого инструмент может одновременно получать вращение и перемещаться в нескольких плоскостях.
- Создаваемая конструкция должна быть рассчитана на достаточно длительный эксплуатационный срок. Для этого используется износостойкий материал, который может выдержать длительное воздействие.
- Уделяется внимание длительности эксплуатации. Привод может служить определенное количество циклов или времени.
- Немаловажным параметром назовем компактность. Слишком большие механизмы возвратно-поступательного движения увеличивают вес конструкции, делают ее более громоздкой.
- Ремонтопригодность считается важным параметром, который должен учитываться. При длительной эксплуатации приходится проводить замену износившихся элементов.
Основные эксплуатационные характеристики во многом зависят от принципа действия механизма возвратно-поступательного перемещения. Именно поэтому следует каждый рассматривать подробно.
Кулисный механизм
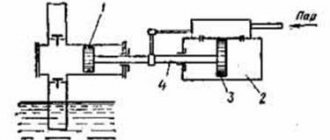
На рис. 9, г представлена схема кулисного механизма, широко применяемого, например, в поперечно-строгальных и долбежных станках. С ползуном 1, на котором закреплен суппорт с режущим инструментом , шарнирно связана при помощи серьги 2 качающаяся влево и вправо деталь 4, называемая кулисой. Внизу кулиса соединена посредством шарнирного соединения 6, причем своим нижним концом она поворачивается около этой оси во время качаний.
Качания кулисы происходят в результате поступательно-возвратных перемещений в ее пазу детали 5, называемой кулисным камнем и получающей движение от зубчатого колеса 3, с которым она соединена. Зубчатому колесу 3, называемому кулисной шестерней, вращение передается колесом, закрепленным на ведущем валу. Скорость вращательного движения кулисного колеса регулируется коробкой скоростей, связанной с электродвигателем.
Длина хода ползуна зависит от того, в каком виде установлен на кулисной шестерне кулисный камень. Чем дальше от центра шестерни расположен кулисный камень, тем больше окружность, которую он описывает при вращении шестерни, и, следовательно, тем больше угол качания кулисы и длиннее ход ползуна. И наоборот, чем ближе к центру колеса установлен кулисный камень, тем меньше все перечисленные движения.
Типы передач для поступательного движения
Встречается довольно большое количество различных устройств, которые могут применяться для преобразования передаваемого усилия. Большое распространение получили следующие варианты:
- Кривошипно-шатунные может применяться для преобразования вращения в возвратно-поступательное движение и наоборот. В качестве основных элементов применяется кривошипный вал, ползун, шатун и специальный элемент кривошипа. Для расчета момента и других параметров могут использоваться различные формулы. В качестве основного элемента также могут использовать коленчатый вал, который имеет одну или несколько ступеней. Они получили весьма широкое распространение, к примеру, двигатели или насосы, сельскохозяйственная техника. При изготовлении основных деталей, как правило, применяется сталь с высокой коррозионной стойкостью.
- Кулисные конструкции получили весьма широкое распространение, так как усилие передается без шатуна. В подобном случае ползун напоминает кулису, в которой делается специальное отверстие. На момент вращения кривошипного вала кулиса двигается вправо и налево. В некоторых случаях вместе кулисы применяется стержень с насаженной втулкой. Для обеспечения контакта применяется прижимная пружина. Существенно повысить качество работы устройства можно за счет установки ролика на конце устройства.
- Кулачковые варианты исполнения применяются для преобразования вращательного перемещения в возвратно-поступательное. Основным элементом конструкции можно назвать кулачки, а также стержень, криволинейный диск. Для направления положения стержня устанавливается втулка, которая характеризуется весьма высокой точностью позиционирования. Снизить степень трения поверхности можно за счет ролика. В некоторых случаях вместо стержня устанавливается касающийся рычаг. Основные параметры могут быть рассчитаны самостоятельно. Механизм возвратно-поступательного движения рассматриваемого типа применяется в самых различных случаях, к примеру, в механизированном оборудовании.
- Шарнирно-рычажные устройства устанавливаются в том случае, если нужно сменить направление движение в какой-либо части устройства. Примером можно назвать ситуация, когда вертикальное перемещение следует перенаправлять в горизонтальное. Кроме этого, в некоторых случаях нужно провести увеличение или уменьшение хода.
Приведенная выше информация указывает на то, что встречается просто огромное количество различных вариантов исполнения механизмов. Выбор проводится по самым различным критериям, которые должны учитываться.
Храповые механизмы
Храповые механизмы позволяют в широком диапазоне изменять величину периодических перемещений рабочих органов машин. Типы и область применения храповых механизмов разнообразны.
Храповой механизм (рис. 10) состоит из четырех основных звеньев: стойки 1, храповика (зубчатого колеса) 4, рычага 2 и детали 3 с выступом, которая носит название собачки. Храповик со скошенными в одну сторону зубьями насажен на ведомый вал механизма. На одной оси с валом шарнирно закреплен рычаг 2, поворачивающийся (качающейся) под действием приводной штанги 6. На рычаге также шарнирно укреплена собачка, выступ которой имеет форму, соответствующую впадине между зубьями храповика.
Во время работы храпового механизма приходит в движение рычаг 2, Когда он движется вправо, собачка свободно скользит по закругленной части зуба храповика, затем она под действием своей силы тяжести или специальной пружины заскакивает во впадину и, упираясь в следующий зуб, толкает его вперед. В результате этого храповик, а с ним и ведомый вал поворачиваются. Обратный поворот храповика с ведомым валом при холостом ходе рычага с собачкой 3 предотвращается стопорной собачкой 5, шарнирно закрепленной на неподвижной оси и прижатой к храповику пружиной.
Описанный механизм преобразует качательное движение рычага в прерывисто-вращательное движение ведомого вала.
Устройство для преобразования возвратно-поступательного движения в прямолинейное
Также механизмы возвратно поступательного движения могут применяться для создания условий прямолинейного перемещения исполнительного органа. Ключевыми моментами подобного варианта исполнения назовем:
- Существенно повышается надежность.
- При изготовлении применяются материалы, характеризующие повышенной износостойкостью.
- Подобные механизмы несколько схожи с теми, которые проводят преобразование вращения в возвратно-поступательное перемещение.
Многие конструкции работают на основе применения прямолинейного перемещения. Именно поэтому они получили весьма широкое распространение.
Установка машины на фундаменте
Установка машины на фундаменте сопровождается выверкой ее в горизонтальной и вертикальной плоскости. Это связано с тем, чтобы обеспечить устойчивость конструкции, исключить опрокидывание машины или самопроизвольное перемещение рабочих органов под силой их тяжести. Требуемая точность установки машины в горизонтальной или вертикальной плоскости может быть в пределах от 0,04 до 0,02 мм/м в зависимости от технологического назначения машины.
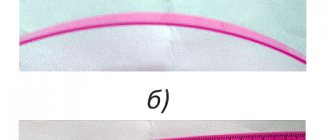
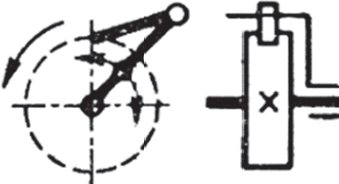
Для установки машин на фундаменте применяют клиновые опоры (рис. 17, а). Эти опоры обеспечивают жесткую связь машины с фундаментом и выверку ее положения в пространстве с заданной точностью. После выверки машину крепят к фундаменту.
В тех случаях, когда внешние вибрации мешают работе станка или машины или когда работа машины сопровождается вибрациями, которые могут передаваться через фундамент, применяют для установки и выверки станка или машины на фундаменте виброгасящие или виброизолирующие опоры с резинометаллическим элементом (рис. 17, б). Их используют в качестве активной и пассивной виброизоляции металлорежущих станков и прочего промышленного оборудования.
Конкретные требования к установке, методы выверки и требования к креплению станка или машины на фундаменте приводят в руководстве по эксплуатации.
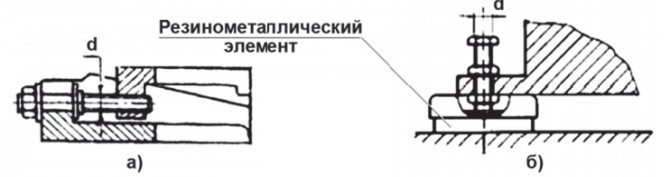
Рис. 17. Опоры для установки станков и машин на фундаменте: а — клиновая; б — виброопора
Возвратно-поступательный механизм своими руками
Существенно сэкономить можно путем создания возвратно-поступательного механизма своими руками. В некоторых случаях его делают из дрели, в других для передачи вращающего крутящего момента используется электрический двигатель.
Особенностями назовем нижеприведенные моменты:
- Большинство конструкций самостоятельно изготовить не получается, так как требуемые детали характеризуются высокой сложностью. Примером можно назвать сочетание кривошипного вала и шестерни.
- Во всех случаях должны проводится расчеты, так как в противном случае обеспечить требуемые параметры не получается.
- Изготовить конструкцию рассматриваемого типа можно только при наличии специального оборудования. Если устройство сделано своими силами, то его реальные параметры от расчетных могут существенно отличаться.
В целом можно сказать, что рассматриваемая задача довольно сложна в исполнении. Именно поэтому работу должны проводить исключительно профессионалы, которые могут провести сложные расчеты, а также изготовить требуемые детали.
Соединения деталей и их типы
Размещение и установку механических передач в машине, а также их взаимную связь обеспечивают детали, которыми производится их соединение при сборке.

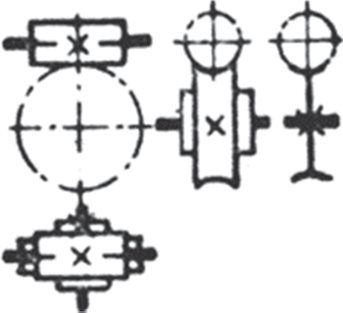
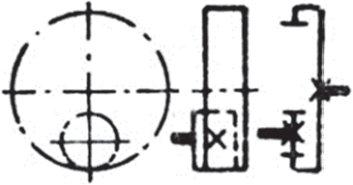
Рис. 16. Схема наиболее распространенных типов соединений
Основные типы соединений приведены на схеме (рис. 16). Типы соединений определяются их названиями на схеме. Соединения деталей в машине или механизме в зависимости от их конструкции могут быть подразделены на подвижные и неподвижные, которые в свою очередь могут быть представлены как соединения разъемные и неразъемные.
Разъемными или разбираемыми называют соединения, которые могут быть разобраны без особых затруднений и без повреждений сопряженных или крепежных деталей. Например, соединения по п садкам с зазором и переходным посадкам, резьбовые и др.
Неразъемными или неразборными называют соединения, разборка которых в процессе эксплуатации не предусмотрена и затруднительна, требует больших усилий и сопровождается повреждением сопрягаемых или крепежных деталей, либо ск епляющего вещества.
Неподвижные, неразборные соединения выполняют клепкой, пайкой, посадками с натягом, склеиванием, прессованием, холодной штамповкой и другими способами. Такие соединения отличаются прочностью и стабильностью взаимного расположения соединяемых деталей.
Неподвижные, разбираемые соединения выполняют с помощ ю переходных посадок и шпонкой, винтовых соединений, соединений с помощью штифтов, конических соединений, клиновых и других соединений.
Область применения
Привод рассматриваемого типа встречаются в самых различных областях. При этом:
- Чаще всего привод устанавливается в станке, предназначенный для обработки металла и дерева.
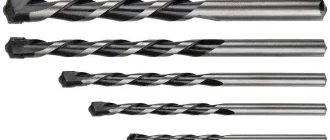
- Некоторые инструмента также основаны на преобразовании вращательного движения в возвратно-поступательное. Примером можно назвать ударную дрель или перфораторы, которые сегодня распространены.
- В промышленности можно встретить транспортеры, конструкции для подъема и опускания различного продукта.
Единственным, но существенным недостатком можно назвать довольно большие размеры устройства. Кроме этого, нужно обеспечивать качественную смазку, так как трение становится причиной нагрева и износа.
Кинематические пары, кинематическая схема
Для рассмотрения процесса передачи механической энергии внутри машины взаимодействующие детали и сборочные единицы принято рассматривать парами.
Кинематической парой называют подвижное соединение двух соприкасающихся звеньев. Свойства пары зависят от формы тех поверхностей, которыми звенья соприкасаются при своем возможном относительном движении. Пара, в которой отсутствует относительное движение между соприкасающимися звеньями, называется соединением. Звенья могут состоять из отдельных деталей или нескольких деталей, неподвижно скрепленных друг с другом. Для графического изображения кинематических пар применяют условные обозначения (табл. 1).
Таблица 1. Условные обозначения кинематических пар механических передач
| Передачи плоским ремнем: а — открытая; б — открытая с натяжным роликом | Коническая передача — зубчатое зацепление между валами, оси которых пересекаются (обозначение без уточнения типа зубьев) | ||
| Передача клиновидными ремнями | Передача реечная (обозначение, без уточнения типа зубьев) | ||
| Передача цепью а — общее обозначение без уточнения типа; 6 — роликовой; в — бесшумной | Передача червячная с цилиндрическим червяком |
| |
| Передачи зубчатые (цилиндрические) между параллельными валами: а — внешнее зацепление (обозначение без уточнения типа зубьев) | Передача зубчатая винтовая | ||
| То же: б — с винтовыми и прямыми зубьями | Передача винт-гайка скольжения: а — неразъемная; б — разъемная | ||
| То же: в — внутреннее зацепление |
| Передача храповым зацеплением |
|
В кинематических парах следует различать ведущие и ведомые звенья. Звено, задающее движение в кинематической паре, называют ведущим, а звено, получающее движение, — ведомым или иногда рабочим.
Система подвижно соединенных звеньев представляет собой кинематическую цепь. Если кинематическая цепь предназначена для получения вполне определенных движений ведомых звеньев, ее называют механизмом.
Кинематические цепи, вычерченные с использованием условных обозначений кинематических пар, называют кинематическими схемами. Кинематические схемы представляют собой систему последовательно расположенных взаимодействующих звеньев, связывающих рабочие звенья с источником движения (рис. 13).
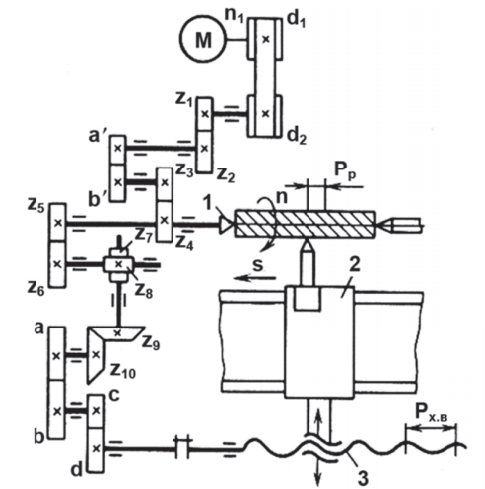
Рис 13. Упрощенная кинематическая схема токарно-винторезного станка
На рис. 13 приведена упрощенная кинематическая схема нарезания резьбы на токарно-винторезном станке. Главное движение (вращение шпинделя с заготовкой 1) осуществляется от электродвигателя М через ременную передачу со шкивами d1и d2, зубчатые колеса z1и z2, сменные зубчатые колеса а’ и б’, зубчатые колеса z3и z4. Продольное перемещение резца (движение подачи) производится передачей вращения от шпинделя через зубчатые колеса z5и z6; винтовые конические колеса z7и z8, z9и z10; сменные зубчатые колеса а и в, с и d к ходовому винту 3. Вращательное движение ходового винта преобразуется в поступательное перемещение суппорта 2 с резцом.