Конический редуктор — это самостоятельный механизм, который при помощи муфт или открытых передач соединяется с электродвигателем и рабочей машиной. Выполняется в виде агрегата, предназначенного для передачи мощности от двигателя к остальным рабочим механизмам. Схема привода может также включать как открытые зубчатые передачи, так и ременную или цепную передачи, закрепленные на валы, которые опираются на подшипники в гнездах корпуса. Основным предназначением прибора является повышение вращающего момента ведомого вала при одновременном снижении угловой скорости.
Передачи и параметры конического редуктора
Вид редуктора зависит от состава передач и положения осей вращения валов. Различают такие типы передач: цилиндрическая, планетарная, коническая, червячная, глобоидная и волновая. Одной из разновидностей углового редуктора является конический, который служит для уменьшения частоты вращения при одновременном повышении вращающего момента. В корпусе механизма находятся передачи с постоянным передаточным отношением.
Конический редуктор имеет следующие параметры: невысокая окружная скорость, средний уровень надежности, точности и металлоемкости, сравнительно низкая себестоимость и трудоемкость. Кроме того, в зависимости от вида передач, расположения осей валового механизма и числа ступеней конические редукторы подразделяются на соосные механизмы, параллельные приспособления, скрещивающиеся и пересекающиеся устройства, могут иметь горизонтальное или вертикальное расположение осей валового механизма и крепиться либо на плиточной основе, либо на приставных опорных лапах. Также ось выходного валового механизма может находиться сбоку, сверху или снизу, относительно плоскости основания.
Современный конический редуктор имеет колесное соединение с круговыми зубьями. Чтобы избежать отрицательной осевой силы на шестерне необходимо, соблюдать совпадение направления вращения зубчатого колесного соединения и наклона линии зуба. Диапазон передаточных чисел составляет от 1 до 5, наиболее распространенный угол наклона равен 350. Существуют также коническо-цилиндрические редукторы, которые выполняют с быстроходной конической ступенью.
Одноступенчатые конические редукторы
Конические редукторы применяют для передачи движения между валами, оси которых пересекаются обычно под углом 90°. Передачи с углами, отличными от 90°, встречаются редко.
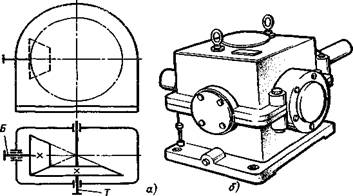
Рис. 2.4. Одноступенчатый редуктор с коническими зубчатыми колесами:
а —
кинематическая схема;
6 —
общий вид
Наиболее распространенный тип конического редуктора показан на рис. 2.4; редуктор с вертикально расположенным тихоходным валом изображен на рис. 2.5. Возможно исполнение редуктора с вертикально расположенным быстроходным валом; в этом случае привод осуществляется от фланцевого электродвигателя.
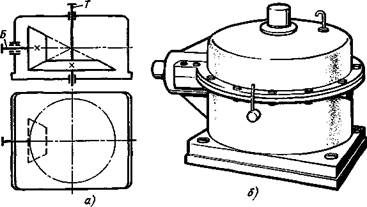
Рис. 2.5. Одноступенчатый конический редуктор с вертикальным ведомым валом:
а — кинематическая схема; б — общий вид
Передаточное число и
одноступенчатых конических редукторов с прямозубыми колесами, как правило, не выше трех; в редких случаях
u =
4.При ко-
сых или криволинейных зубьях u
= 5 (в виде исключения
и =
6,30).
У редукторов с коническими прямозубыми колесами допускаемая окружная скорость (по делительной окружности среднего диаметра) v
£ 5 м/с. При более высоких скоростях рекомендуют применять конические колеса с круговыми зубьями, обеспечивающими более плавное зацепление и большую несущую способность.
Двухступенчатые цилиндрические редукторы
Наиболее распространены двухступенчатые горизонтальные редукторы, выполненные по развернутой схеме (рис. 2.6). Эти редукторы отличаются прос тотой, но из-за несимметричного расположения колес на валах повышается концентрация нагрузки по длине зуба. Поэтому в этих редукторах следует применять жесткие валы.
Соосная схема (рис. 2.7) позволяет получить меньшие габариты по длине; это ее основное преимущество.
В соосных редукторах быстроходная ступень зачастую недогружена*, так как силы, возникающие в зацеплении колес тихоходной ступени, значительно больше, чем в быстроходной, а межосевые расстояния ступеней одинаковы (аwБ = аwT). Указанное обстоятельство является одним из основных недостатков соосных редукторов. Кроме того, к их недостаткам относят также:
а) большие габариты в направлении геометрических осей валов, по сравнению с редукторами, выполненными по развернутой схеме;
б) затруднительность смазывания подшипников, расположенных в cредней части корпуса;
в) большое расстояние между опорами промежуточного вала, поэтому требуется увеличить его диаметр для обеспечения достаточной прочности и жесткости.
Очевидно, применение соосных редукторов ограничивается случаями, когда нет необходимости иметь два выходных конца быстроходного или тихоходного вала, а совпадение геометрических осей входного и выходного валов удобно при намеченной общей компоновке привода.
В отношении типа зубьев и подшипников в двухступенчатых редукторах справедливо сказанное относительно одноступенчатых цилиндрических редукторов; часто быстроходную ступень выполняют косозубой, а тихоходную — прямозубой (это относится как к соосным, так и к несоосным редукторам).
Редуктор с раздвоенной быстроходной ступенью, имеющий косозубые колеса, показан на рис. 2.8. Тихоходная ступень при этом может иметь либо шевронные колеса, либо прямозубые (рис. 2.8, б). Кинематическая схема и общий вид редуктора с раздвоенной тихоходной ступенью показаны на рис. 2.9.
* При сравнительно небольшом общем передаточном числе (и »
8¸16) можно (при обеспечении удовлетворительной компоновки редуктора) так произвести разбивку общего передаточного числа по ступеням, что нагрузочная способность быстроходной ступени будет использована полностью.
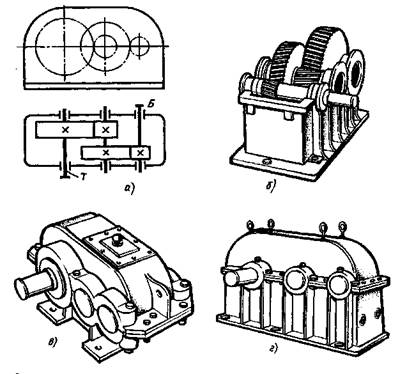
Рис. 2.6. Двухступенчатый горизонтальный редуктор с цилиндрическими колесами:
а — кинематическая схема; б —
редуктор со снятой крышкой (колеса косозубые);
в —
общий вид редуктора, у которого подшипниковые узлы закрыты врезными крышками;
г —
общий вид редуктора, у которого подшипниковые крышки привернуты винтами
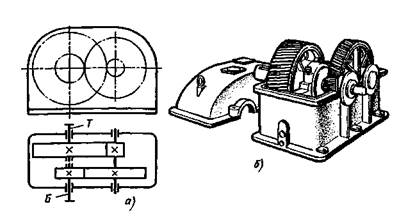
Рис. 2.7. Двухступенчатый горизонтальный соосный редуктор:
а —
кинематическая схема;
б —
общий вид
При раздвоенной быстроходной (или тихоходной) ступени колеса расположены симметрично относительно опор, что приводит к меньшей концентрации нагрузки по длине зубьев, чем при применении обычной развернутой или соосной схемы. Это позволяет иметь в рассматриваемом случае менее жесткие валы. Быстроходный вал редуктора, показанного на рис. 2.8, б,
должен иметь свободу осевого перемещения («плавающий» вал), что обеспечивается соответствующей конструкцией подшипниковых узлов; в редукторе с шевронными тихоходными колесами свободу осевого перемещения должен иметь и тихоходный вал. При соблюдении указанного условия нагрузка распределяется поров-
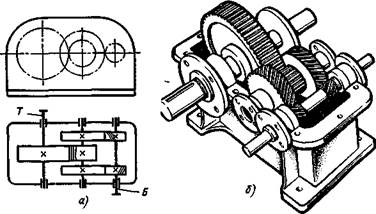
Рис. 2.8. Двухступенчатый горизонтальный редуктор с раздвоенной первой быстроходной) ступенью:
а —
кинематическая схема; б —общий вид (без крышки)
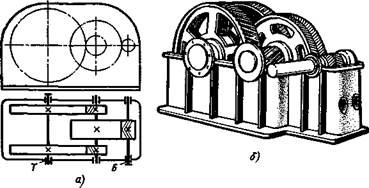
Рис. 2.9. Двухступенчатый горизонтальный редуктор с раздвоенной второй (тихоходной) ступенью:
а —
кинематическая схема;
б —
общий вид (6eз крышки)
ну между параллельно работающими парами зубчатых колес.
Схемы вертикальных цилиндрических двухступенчатых редукторов приведены на рис. 2.10.
Двухступенчатые цилиндрические редукторы обычно применяют в широком диапазоне передаточных чисел: по ГОСТ 2185-66 u
= 6,3 ¸ 63. Крупные двухступенчатые цилиндрические редукторы, выпускаемые НКМЗ, имеют
u
= 7,33 ¸ 44,02.
От целесообразной разбивки общего передаточного числа двухступенчатого редуктора по его отдельным ступеням в значительной степени зависят га-
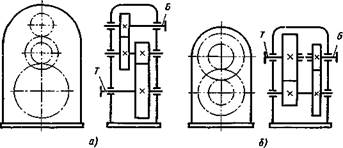
Рис. 2.10. Кинематические схемы двухступенчатых цилиндрических вертикальных редукторов:
а – выполненного по развернутой схеме (трехосного); б —соосного
бариты редуктора, удобство смазывания каждой ступени, рациональность конструкции корпуса и удобство компоновки всех элементов передач. Дать рекомендации разбивки передаточного числа, удовлетворяющие всем указанным требованиям, невозможно, и поэтому все рекомендации следует рассматривать как ориентировочные.
Ниже приведена разбивка передаточных чисел для некоторых двухступенчатых редукторов, выпускаемых НКМЗ:
u
. . . 8,05 9,83 10,92 12,25 13,83 15.60 17,78 20,49 22,12 23,15
u
Б . . . 2,30 2,808 3,125 3,500 3,950 3.950 4,500 5,187 5,600 6,615
Конические редукторы применяют для передачи движения между валами, оси которых пересекаются обычно под углом 90°. Передачи с углами, отличными от 90°, встречаются редко.
Рис. 2.4. Одноступенчатый редуктор с коническими зубчатыми колесами:
а —
кинематическая схема;
6 —
общий вид
Наиболее распространенный тип конического редуктора показан на рис. 2.4; редуктор с вертикально расположенным тихоходным валом изображен на рис. 2.5. Возможно исполнение редуктора с вертикально расположенным быстроходным валом; в этом случае привод осуществляется от фланцевого электродвигателя.
Рис. 2.5. Одноступенчатый конический редуктор с вертикальным ведомым валом:
а — кинематическая схема; б — общий вид
Передаточное число и
одноступенчатых конических редукторов с прямозубыми колесами, как правило, не выше трех; в редких случаях
u =
4.При ко-
сых или криволинейных зубьях u
= 5 (в виде исключения
и =
6,30).
У редукторов с коническими прямозубыми колесами допускаемая окружная скорость (по делительной окружности среднего диаметра) v
£ 5 м/с. При более высоких скоростях рекомендуют применять конические колеса с круговыми зубьями, обеспечивающими более плавное зацепление и большую несущую способность.
Двухступенчатые цилиндрические редукторы
Наиболее распространены двухступенчатые горизонтальные редукторы, выполненные по развернутой схеме (рис. 2.6). Эти редукторы отличаются прос тотой, но из-за несимметричного расположения колес на валах повышается концентрация нагрузки по длине зуба. Поэтому в этих редукторах следует применять жесткие валы.
Соосная схема (рис. 2.7) позволяет получить меньшие габариты по длине; это ее основное преимущество.
В соосных редукторах быстроходная ступень зачастую недогружена*, так как силы, возникающие в зацеплении колес тихоходной ступени, значительно больше, чем в быстроходной, а межосевые расстояния ступеней одинаковы (аwБ = аwT). Указанное обстоятельство является одним из основных недостатков соосных редукторов. Кроме того, к их недостаткам относят также:
а) большие габариты в направлении геометрических осей валов, по сравнению с редукторами, выполненными по развернутой схеме;
б) затруднительность смазывания подшипников, расположенных в cредней части корпуса;
в) большое расстояние между опорами промежуточного вала, поэтому требуется увеличить его диаметр для обеспечения достаточной прочности и жесткости.
Очевидно, применение соосных редукторов ограничивается случаями, когда нет необходимости иметь два выходных конца быстроходного или тихоходного вала, а совпадение геометрических осей входного и выходного валов удобно при намеченной общей компоновке привода.
В отношении типа зубьев и подшипников в двухступенчатых редукторах справедливо сказанное относительно одноступенчатых цилиндрических редукторов; часто быстроходную ступень выполняют косозубой, а тихоходную — прямозубой (это относится как к соосным, так и к несоосным редукторам).
Редуктор с раздвоенной быстроходной ступенью, имеющий косозубые колеса, показан на рис. 2.8. Тихоходная ступень при этом может иметь либо шевронные колеса, либо прямозубые (рис. 2.8, б). Кинематическая схема и общий вид редуктора с раздвоенной тихоходной ступенью показаны на рис. 2.9.
* При сравнительно небольшом общем передаточном числе (и »
8¸16) можно (при обеспечении удовлетворительной компоновки редуктора) так произвести разбивку общего передаточного числа по ступеням, что нагрузочная способность быстроходной ступени будет использована полностью.
Рис. 2.6. Двухступенчатый горизонтальный редуктор с цилиндрическими колесами:
а — кинематическая схема; б —
редуктор со снятой крышкой (колеса косозубые);
в —
общий вид редуктора, у которого подшипниковые узлы закрыты врезными крышками;
г —
общий вид редуктора, у которого подшипниковые крышки привернуты винтами
Рис. 2.7. Двухступенчатый горизонтальный соосный редуктор:
а —
кинематическая схема;
б —
общий вид
При раздвоенной быстроходной (или тихоходной) ступени колеса расположены симметрично относительно опор, что приводит к меньшей концентрации нагрузки по длине зубьев, чем при применении обычной развернутой или соосной схемы. Это позволяет иметь в рассматриваемом случае менее жесткие валы. Быстроходный вал редуктора, показанного на рис. 2.8, б,
должен иметь свободу осевого перемещения («плавающий» вал), что обеспечивается соответствующей конструкцией подшипниковых узлов; в редукторе с шевронными тихоходными колесами свободу осевого перемещения должен иметь и тихоходный вал. При соблюдении указанного условия нагрузка распределяется поров-
Рис. 2.8. Двухступенчатый горизонтальный редуктор с раздвоенной первой быстроходной) ступенью:
а —
кинематическая схема; б —общий вид (без крышки)
Рис. 2.9. Двухступенчатый горизонтальный редуктор с раздвоенной второй (тихоходной) ступенью:
а —
кинематическая схема;
б —
общий вид (6eз крышки)
ну между параллельно работающими парами зубчатых колес.
Схемы вертикальных цилиндрических двухступенчатых редукторов приведены на рис. 2.10.
Двухступенчатые цилиндрические редукторы обычно применяют в широком диапазоне передаточных чисел: по ГОСТ 2185-66 u
= 6,3 ¸ 63. Крупные двухступенчатые цилиндрические редукторы, выпускаемые НКМЗ, имеют
u
= 7,33 ¸ 44,02.
От целесообразной разбивки общего передаточного числа двухступенчатого редуктора по его отдельным ступеням в значительной степени зависят га-
Рис. 2.10. Кинематические схемы двухступенчатых цилиндрических вертикальных редукторов:
а – выполненного по развернутой схеме (трехосного); б —соосного
бариты редуктора, удобство смазывания каждой ступени, рациональность конструкции корпуса и удобство компоновки всех элементов передач. Дать рекомендации разбивки передаточного числа, удовлетворяющие всем указанным требованиям, невозможно, и поэтому все рекомендации следует рассматривать как ориентировочные.
Ниже приведена разбивка передаточных чисел для некоторых двухступенчатых редукторов, выпускаемых НКМЗ:
u
. . . 8,05 9,83 10,92 12,25 13,83 15.60 17,78 20,49 22,12 23,15
u
Б . . . 2,30 2,808 3,125 3,500 3,950 3.950 4,500 5,187 5,600 6,615
Расчет конического редуктора
Главным параметром конического редуктора является реальный диапазон передаточных отношений, который составляет 6,3 (в других вариантах может находиться в диапазоне от 1 до 1000). Основная сфера применения — это передача вращающего момента между валовыми механизмами. В качестве недостатка конического редуктора, можно назвать сравнительную сложность при их производстве и выполнении монтажных операций.
При изготовлении конического редуктора рассчитывается передача по контактным напряжениям, в ходе данного процесса проверяется напряжение изгиба, и определяются объемный размер и масса зубчатых колесных приспособлений, размеры корпусного основания оборудования и цельный вес конического редуктора. На все перечисленные параметры оказывает существенное влияние выбор разновидности термической обработки.

По сравнению с аналогичными механизмами, можно выделить следующие преимущества конического редуктора:
— повышенная безопасность при эксплуатации; — высокая аксиальная и радиальная несущая способность; — некоторое увеличение вращающего момента на выходе; — бесшумность в рабочем состоянии; — длительный срок службы и сравнительная простота в ремонте и техобслуживании.
К недостаткам относится сложная технология производства и монтажа конического редуктора, а также большие осевые и изгибные нагрузки на валовый механизм.

Электронная библиотека
Технология машиностроения / Детали машин и основы конструирования / 2.16. ЭСКИЗНАЯ КОМПоНОВКА РЕДУКТОРА
При эскизной компоновке устанавливает положение колес редукторной пары, элемента открытой передачи и муфты относительно опор (подшипников); определяет расстояние и между точками приложения реакций подшипников быстроходного (lБ) и тихоходного (lт) валов, а также точки приложения силы давления элемента открытой передачи и муфты на расстоянии lоп и lм от реакции смежного подшипника. Эскизная компоновка выполняется в соответствии с требованиями единой системы конструкторской документации (ЕСКД) на миллиметровой бумаге формата А2, А1 карандашом в контурных линиях в масштабе 1:1 и должна содержать: эскизное изображение редуктора в двух проекциях, таблицу параметров редуктора. Эскизную компоновку редуктора рекомендуется выполнить в такой последовательности:
1. Наметить расположение проекций компоновки в соответствии с кинематической схемой привода и наибольшими размерами колес.
2. Провести оси проекций и осевые линии валов. В цилиндрическом и червячном редукторах оси валов провести на расстоянии, равном размеру между осями валов, при этом в цилиндрическом редукторе оси параллельны, а в червячном – скрещиваются под углом 90°. В коническом редукторе оси валов пересекаются под углом 90е.
3. Вычертить редукторную пару (рис. 2.16 – 2.18) в соответствии с геометрическими параметрами, полученными в результате проектного расчета (построение зацепления пары см. рис. 2.2, 2.4, 2.5):
а) для цилиндрического колеса и шестерни – d1, d2, dal, dа2, b1, b2;
б) для конического колеса и шестерни – Re, de1, de2, δl, δ2, hae= mte, hf2 = l,2mte, b, b3;
в) для червячного колеса и нарезанной части червяка – dw2, daМ1, b2, dwl, dal, df1, b1, 2δ .
4. Для предотвращения задевания поверхностей вращающихся колес за внутренние стенки корпуса между контурами стенок редуктора и поверхностью колес предусмотреть зазор x= 8…10 мм; такой же зазор предусмотреть между подшипниками и контуром стенок. Расстояние (у)между дном корпуса и поверхностью колес или червяка для всех типов редукторов принять у > 4 х. В конических редукторах следует предусмотреть симметричность корпуса относительно оси быстроходного вала с1 = с2 (см. рис. 2.17).
Рис. 2.16. Эскизная компоновка цилиндрического одноступенчатого редуктора
1. Вычертить ступени вала на соответствующих осях по размерам dи l, полученным в проектном расчете валов:
а) В цилиндрическом редукторе (см. рис. 2.16) ступени валов вычертить в последовательности от 3-й к 1-й. При этом длина 3-й ступени l3 получается конструктивно, как расстояние между противоположными стенками редуктора.
б) В коническом редукторе (см. рис. 2.17) ступени тихоходного вала вычертить в последовательности от 5-й к 1-й. При этом длины 5-й и 3-й (l5; l3) ступеней вала получаются конструктивно. Третью ступень вала с насажанным колесом следует расположить противоположно от выходного конца вала с консольной нагрузкой, что обеспечит более равномерное распределение сил между подшипниками.
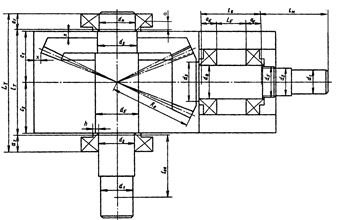
Рис. 2.17. Эскизная компоновка конического одноступенчатого редуктора
Расположение ступеней быстроходного вала зависит от положения подшипников на 4-й ступени: нужно по величине аб(см.

рис. 2.17) определить точку приложения реакции подшипника, смежного с шестерней. Установить расстояние от этой точки до точки приложения на среднем диаметре шестерни, которая определяет длину консоли. Затем определить положение второго подшипника, приняв расстояние LБ не менее удвоенной длины консоли. Остальные ступени вычертить в такой же последовательности, как и ступени тихоходного вала.
в) В червячном редукторе (см. рис. 2.18) ступени тихоходного вала вычертить в последовательности от 3-й к 1-й. При этом длина 3-й ступени l3 получится конструктивно, как расстояние между противоположными стенками редуктора. Расположение ступеней быстроходного вала зависит от положения 2-й и 4-й ступеней, которое определяется построением подшипников через дугу радиуса R = daM2/2 + x,отверстие под подшипниковый узел с диаметром наружного кольца Dи размер S = (0.1…0,2) D.
Остальные ступени вычертить в такой же последовательности, как и ступени тихоходного вала.
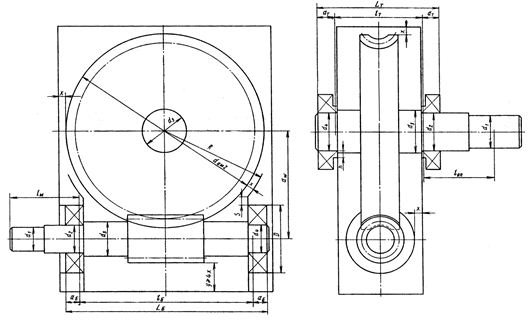
Рис. 2.18. Эскизная компоновка червячного одноступенчатого редуктора
1. На 2-й и 4-й ступенях вычертить контуры подшипников по размерам d,D,В (Т, с)в соответствии со схемой их установки (см. табл. 2.38). Для конических роликоподшипников: h1/6 (D – d). Контуры вычерчивать основными линиями, диагонали – тонкими.
2. Определить расстояния между точками приложения реакций подшипников быстроходного (lь) и тихоходного (lт) валов.
Радиальную реакцию подшипника (R) можносчитать приложенной в точке пересечения нормали к середине поверхности контакта наружного кольца и тела качения подшипника с осью вала:
а) для радиальных подшипников точка приложения реакции лежит в средней плоскости подшипника, а расстояние между реакциями опор вала (см. рис. 2.16): lТ(Б) = LТ(Б) – BТ(Б);
б) для радиально-упорных подшипников точка приложения реакции смещается от средней плоскости, и ее положение определяется расстоянием а, измеренным от широкого торца наружного кольца (см. рис. 2.17):
а = 0,5 –
для радиально-упорных однорядных шарикоподшипников;
a = 0,5 –
для конических однорядных роликоподшипников.
Здесь d, D, В, Т –
геометрические размеры подшипников: – угол контакта; е
–
коэффициент влияния осевого нагружения. При установке подшипников по схеме 3 (враспор) l = L – 2a (см. табл. 2.38); при установке по схеме 4 (врастяжку): l = L + 2a .
С достаточной точностью можно принять, что для радиально-упорных подшипников точка приложения реакции лежит в средней плоскости, тогда а = 0.
3. Определить точки приложения консольных сил:
а) для открытых передач силу давления ременной, цепной передачи (Fon),силы в зацеплении зубчатых передач (Fton, Fa оп) принять приложенными к середине выходного конца вала на расстоянии (lоп) от точки приложения реакции смежного подшипника (см. рис. 2.16 – 2.18);
б) сила давления муфты (FМ), приложена между полумуфтами, поэтому можно принять, что в полумуфте точка приложения силы FMнаходится в торцевой плоскости выходного конца соответствующего вала на расстоянии lм от точки приложения реакций смежного подшипника (см. рис. 2.16 – 2.18).
1. Проставить на проекциях эскизной компоновки необходимые размеры.